Gruppenbeschreibung
Die Erfassung und Analyse von 3D-Sensordaten gewinnt vor allem in solchen Anwendungsbereichen an Bedeutung, in denen ein hohes Maß an Automatisierung und Zuverlässigkeit in der Objekterkennung erforderlich ist. Beispielhafte Anwendungen sind etwa die Kollisions- und Gefahrenvermeidung für Fahrzeuge, Fluggeräte und mobile Roboter, die Erkennung und Verfolgung von Objekten im Nah- und Fernbereich, sowie das großräumige Monitoring von Umgebungen und Einsatzgebieten.
Bei der Auswertung von 3D-Daten besteht der Unterschied zur klassischen Bildverarbeitung darin, dass die räumliche Objektgeometrie nicht rekonstruiert werden muss, sondern in den Daten unmittelbar vorliegt. Die Objekterkennung wird dadurch erleichtert, dass eine Segmentierung der 3D-Daten und eine Bewertung von Formmerkmalen unabhängig von den Beleuchtungsverhältnissen und Farbkontrasten möglich sind.
Die Gruppe Objekterkennung in 3D-Sensordaten bearbeitet dieses Thema in einem breiten Anwendungsspektrum. Hierbei werden Auswerteverfahren für gängige aber auch für prototypische 3D-Sensoren entwickelt und optimiert. Zu den vorrangig eingesetzten Sensortypen gehören vor allem Sensoren mit aktiver Beleuchtung (LiDAR-Sensoren, Laserscanner). Neben der Objekterkennung werden Daten dieser Sensoren auch zum gebietsweiten Monitoring (z. B. zur 3D-Änderungsdetektion) und zur Bereitstellung von Kontextinformationen für die Bildauswertung genutzt.
Themen und Projekte
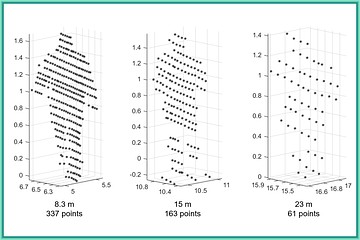 |
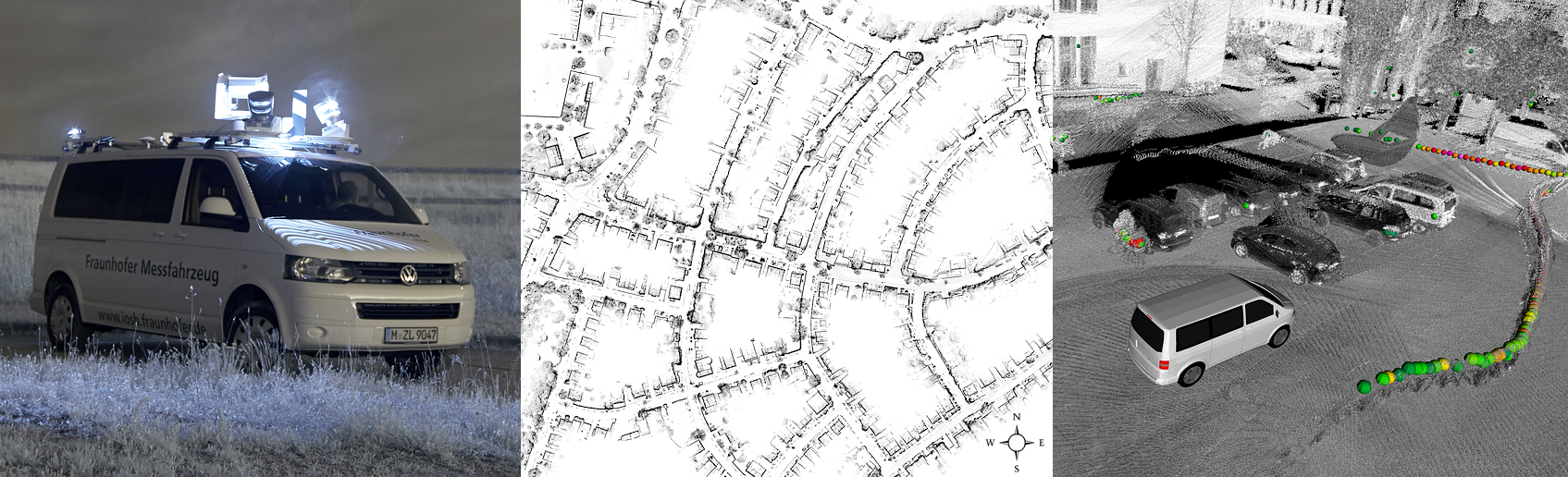
3D-Objekterkennung und 3D-Tracking Bei der 3D-Objekterkennung und dem Tracking detektierter Objekte liegt ein Forschungsschwerpunkt der Gruppe auf der Verwendung von 360°-scannenden LiDAR-Sensoren im mittleren Entfernungsbereich (ca. 2 m bis 100 m) zur fahrzeugbezogenen Gefahrenerkennung. Beispiele sind die Gefährdungsanalyse durch Detektion und Bewegungsverfolgung von Personen im eigenen Fahrzeugumfeld oder die Detektion kleiner dynamischer Objekte wie Mini-UAVs (Drohnen, Quadrocopter). Die ortsgenaue Detektion in den 3D-Daten wird auch dazu verwendet, höherauflösende Sensoren zum Tracking und zur weiteren Analyse auf Objekthinweise auszurichten. |
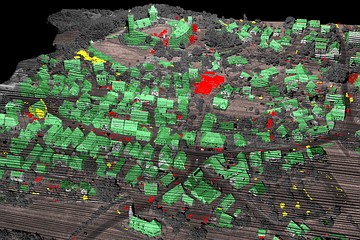 |
Gebietsweite 3D-Analyse und Monitoring Zum Monitoring städtischer Gebiete werden Methoden zur automatischen 3D-Änderungsdetektion mit Daten mobiler Laserscanner entwickelt. Anwendungen hiervon sind etwa die Erkennung von Beschädigungen oder die Gefahrenbeurteilung bei der Durchführung von Sondertransporten. Die zur Referenzdatenerzeugung dienenden Verfahren behandeln außerdem die Kalibrierung des jeweiligen Sensorsystems, die objektbasierte Analyse und die Koregistrierung mehrerer 3D-Punktwolken. Zur Änderungsdetektion erfolgt der Vergleich aktueller 3D-Daten mit den Referenzdaten durch geländereferenzierte Selbstlokalisierung und Analyse von Raumbelegungskonflikten. |
 |
Sensorfahrzeug und Technologiedemonstrator MODISSA Oft besteht der Bedarf an einem vielseitig einsetzbaren und konfigurierbaren Fahrzeug, das die zu Forschungszwecken nötigen Technologie- und Verfahrenstests für eine Vielzahl möglicher Sensoren und für verschiedene Einsatzszenarien erlaubt. Beim Technologieträger MODISSA (engl. Mobile Distributed Situation Awareness) handelt es sich um die IOSB-eigene Realisierung einer Experimentierplattform zur Sensorbewertung und Verfahrensentwicklung im Zusammenhang mit Aufgabenstellungen und Rahmenbedingungen von Fahrzeugschutz und fahrzeugbezogener Sicherheit, auch bei militärischen Anwendungen. |
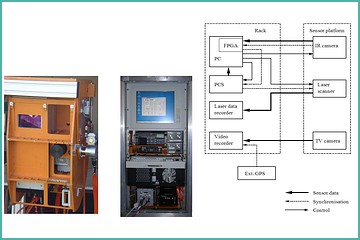 |
Datenaufzeichnung und Sensorsynchronisation in Multisensorsystemen Im Rahmen verschiedener Projekte der Abteilung Objekterkennung werden Messanlagen konzipiert und aufgebaut, die Daten von mehreren bildgebenden Sensoren aufzeichnen können. Um die gemeinsame Verarbeitung aller Daten zu ermöglichen, werden die Sensoren typischerweise mit einem Navigationssystem synchronisiert. Zur Synchronisation mit Sub-Frame-Genauigkeit werden Messungen des Zeitverhaltens von Kameras durchgeführt. |
 |
Bereitgestellte 3D-Datensätze (Testdaten, Benchmark-Datensätze) Durch die Abteilung Objekterkennung am Fraunhofer IOSB werden Datensätze mit eigenen Messsystemen erfasst und wissenschaftlich ausgewertet. Ausgewählte 3D-Datensätze werden hier zum Herunterladen bereitgestellt und damit innerhalb der Wissenschaftsgemeinde verfügbar gemacht. Die Daten können z. B. im Bereich der 3D-Objekterkennung und der großräumigen 3D-Datenanalyse zur Verfahrensentwicklung und Verfahrensbewertung verwendet werden. |