
Group description:
The acquisition and analysis of 3D data is of increasing importance in those application areas that require a high degree of automation and reliability of object recognition. For instance, typical applications include collision avoidance for vehicles/aircrafts or mobile robots, the detection and tracking of objects in close- and long-range environments, as well as monitoring of operational areas.
In contrast to classical methods of image processing, the analysis of 3D data does not require any reconstruction of the geometry of 3D objects, as this information is inherently included in the data. Object recognition in 3D data is further supported by the fact that the segmentation of the data and the evaluation of shape features can be performed independent of lighting conditions and color contrasts.
The group Object Recognition in 3D Data addresses this topic for a wide range of applications. Methods for 3D data analysis are developed, optimized and evaluated for use with established sensor techniques as well as prototypical hardware. The majority of the investigated sensor types belong to the category of active illumination devices (LiDAR sensors, laser scanners) operated on mobile platforms. In addition to object recognition, data acquired by theses sensors are used for area-wide monitoring (e.g., change detection) and to provide context information for image exploitation.
Research topics and projects
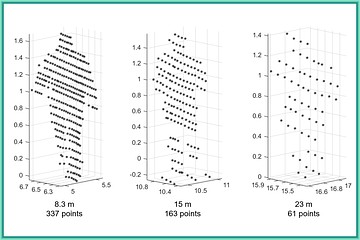 |
3D object recognition and 3D tracking With regard to 3D object detection and tracking, a main focus of the group is the utilization of 360° scanning LiDAR sensors at a medium distance range (between 2 m and 100 m) to improve vehicle-related safety. In order to increase road and traffic safety, the behavior of pedestrians can be predicted by tracking their 3D movement. Another security-related application is LiDAR-based detection and tracking of small UAVs. In addition to 360° situational awareness, sensors with a narrow field-of-view can be used for verification, tracking, and further analysis. |
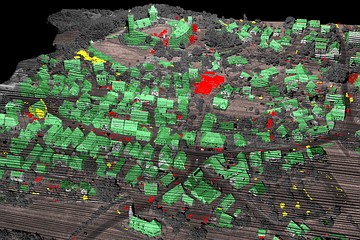 |
Area-wide 3D analysis and monitoring To support the monitoring of urban areas, automatic change detection methods are developed for the analysis of mobile laser scanning data (MLS, ALS). Possible applications are, for instance, damage inspection and heavy/oversized transportation planning. The acquisition of reference data with LiDAR sensors is combined with an object-based data analysis, a registration of overlapping point clouds, and the calibration of the sensor system. The framework for comparison of LiDAR data is divided into segmentation, terrain-referenced localization, and the identification of conflicting information along the laser pulse propagation path. |
 |
The MODISSA testbed Many scientific studies require a versatile research vehicle that provides testing and analysis functionalities for a wide range of sensors and various operating scenarios. MODISSA (Mobile Distributed Situation Awareness) is the IOSB's realization of an experimental platform for hardware evaluation and software development in the contexts of automotive safety, security, and military applications. |
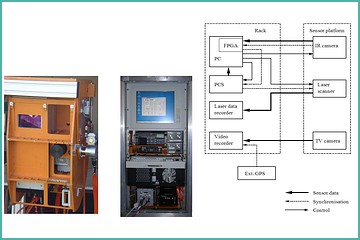 |
Synchronized multi-sensor data aquisition systems We design and construct measurement setups for synchronized data acquisition from multiple imaging sensors. The sensors are synchronized with a GNSS⁄IMU (INS) system in order to allow joint off-line processing. For synchronization with sub-frame accuracy, we develop methods to measure the sensor timing and latency properties. |
 |
Available data (test data, benchmark data sets) At Fraunhofer IOSB, the department Object Recognition uses multi-sensor platforms for the acquisition of sensor data. Some of these data are made publicly available to the scientific community. The 3D data available for download are well suited for the development of methods for 3D object detection, LiDAR-SLAM, and for the investigation of other applications, e.g., city modeling. |