We design and construct measurement setups for synchronized data acquisition from multiple imaging sensors. The sensors are synchronized with a GNSS⁄IMU (INS) system in order to allow joint off-line processing. For synchronization with sub-frame accuracy, we develop methods to measure the sensor timing and latency properties.
Development of image processing methods requires high-quality image data. For obtaining such data, our department regularly performs field trials. For maximum image quality, only lossless data compression is acceptable. Recording devices are often operated in moving vehicles or aircraft and therefore have to tolerate shocks and vibrations. As ground truth for verifying image processing results, the position and orientation of the vehicle has to be recorded. The sensor data have to be synchronized with the navigation data to allow combining them in a meaningful way. This also allows comparing and joint processing of data from multiple sensors. Cameras that are not designed to be integrated into larger systems have to be adapted using custom hardware on FGPAs.
Data acquisition systems for the following sensors and vehicles have been built or are being built:
- Operation of a line scanning LIDAR and an infrared and a video camera in a helicopter, with a custom-designed tilting sensor platform (Link)
- Recording from two infrared cameras and one high-resolution video camera in an off-road truck, in conditions of extreme mechanical shocks
- Operation and on-line processing of an area-scanning LIDAR on a van (Link)
- Recording from a rotating LIDAR and object tracking with cameras on a pan-tilt unit in a van (Link)
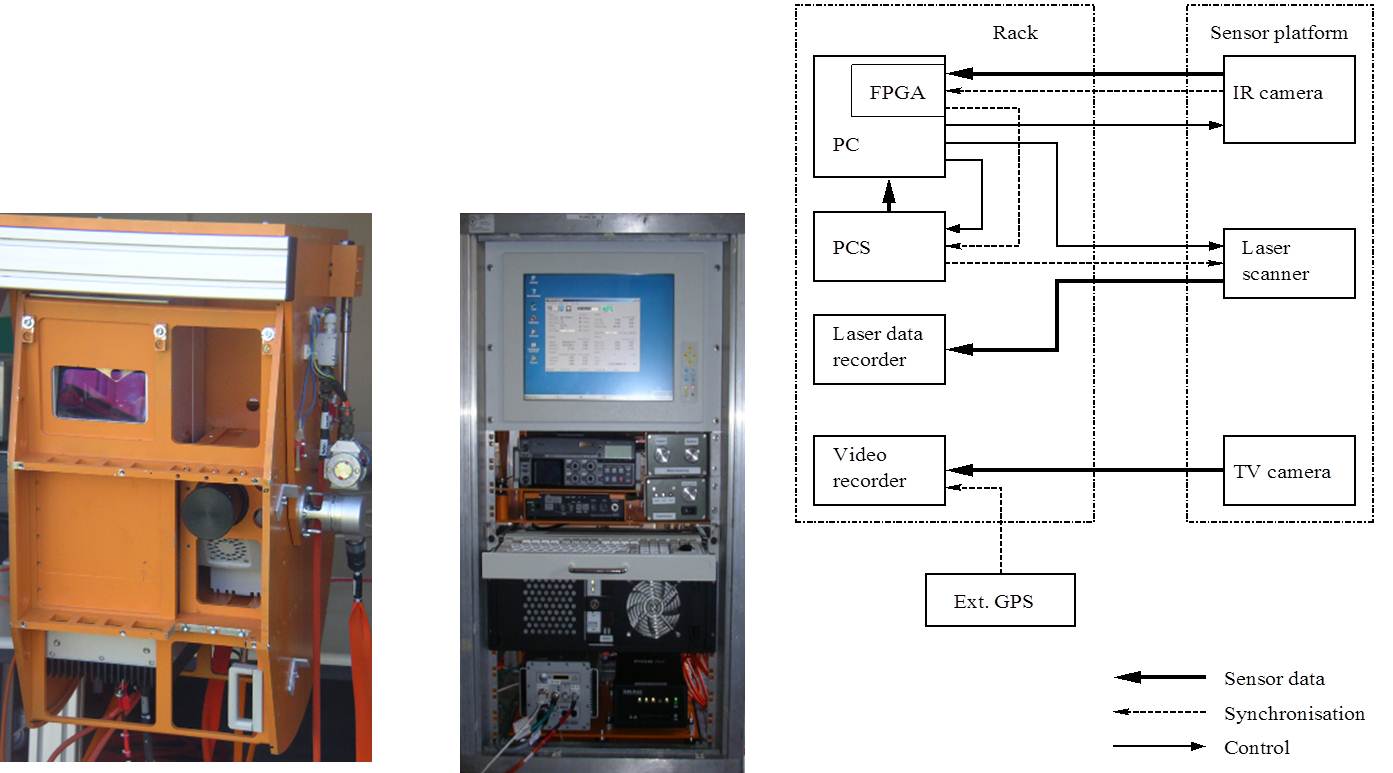
Sensor platform, electronics rack and data paths of the helicopter data acquisition system.
Sensor synchronization and joint processing of image data raises the question of how quickly a camera acts on a signal triggering acquisition of a frame. Our group has developed a method to measure such triggering delays that works for both infrared and video cameras. A mechanical shutter that is regularly opening and closing is recorded with the camera being investigated. The triggering delay can be derived from the opening state of the shutter in each frame compared to a reference measurement with a high-speed camera.
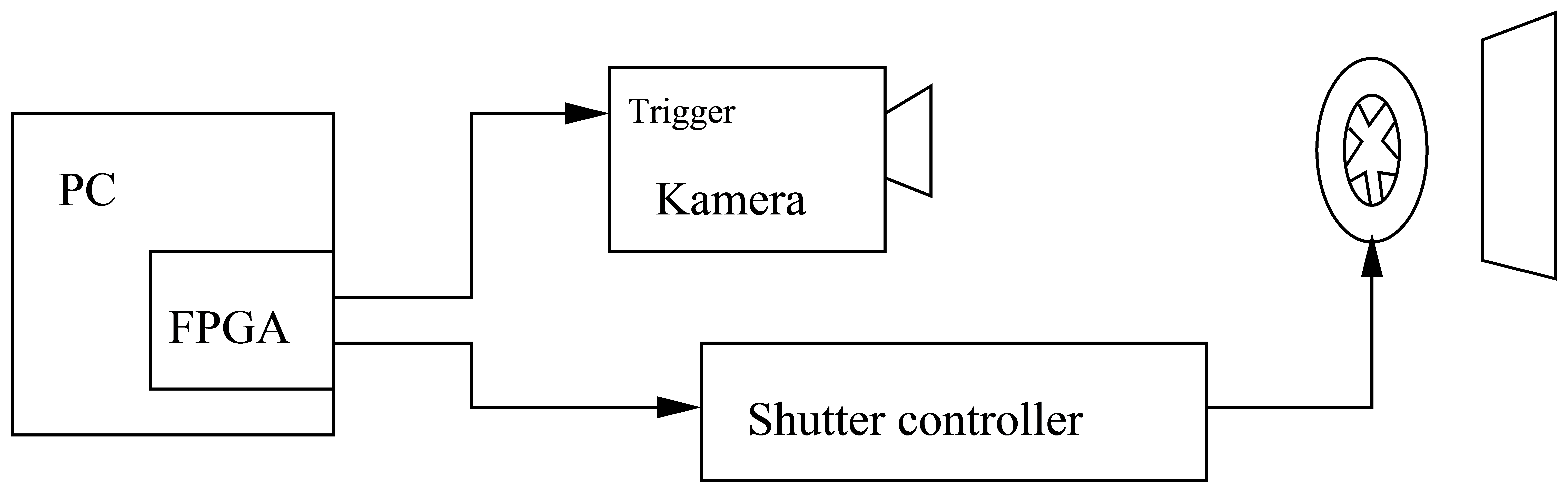
Setup for measurement of camera trigger delay.
Additional information
- Schatz, V., 2008. Synchronised data acquisition for sensor data fusion in airborne surveying. 11th International Conference on Information Fusion, Proceedings, ISBN: 978-3-00-024883-2, pp. 1125-1130. [publica]
- Schatz, V., 2017. Measurement of the timing behaviour of off-the-shelf cameras. Measurement Science and Technology 28 (4), Art. 045905, 8 p. [DOI: 10.1088/1361-6501/aa5d8a] [publica]