Change detection in urban areas by object-based analysis and on-the-fly comparison of multiview ALS data
(ALS: Airborne Laser Scanning)
Initial situation
The identification of changes in urban areas is a common approach used for damage inspection, traffic monitoring, or documentation of urban development. The implementation of an automatic change detection procedure requires the acquisition and comparison of multitemporal remote sensing data. Special requirements must be met by the sensors and the methods used for data processing if the results are intended to support short-term operations, such as airborne surveillance of urban areas, terrain-referenced navigation, or detection of rapid changes. Examples for these scenarios can be found in semi-automatic flight guidance for helicopters, landing operations in urban terrain, obstacle avoidance, search and rescue missions, emergency services, or disaster management.
Project description
In the studies performed at Fraunhofer IOSB/OBJ, airborne laser scanning (ALS) is employed to cope with the tasks of automatic change detection. ALS belongs to the group of established technologies for directed data acquisition. In contrast to other remote sensing techniques, it delivers instantaneous 3-D measurements which enables the immediate interpretation of these data. Novel to the proposed approach is the consideration of multiview ALS scans that are acquired with an oblique forward-looking laser scanner. In addition to advantages in terms of data coverage, this configuration fulfils the requirements of the above-mentioned applications.
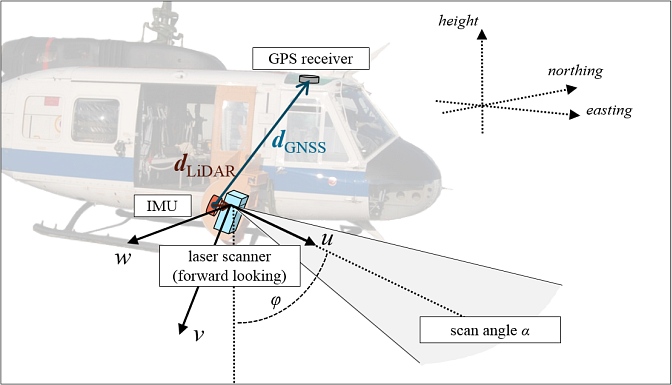
Exemplary ALS sensor carrier and configuration: laser scanner, GNSS receiver, and IMU installed on a helicopter (Bell UH-1D).
Details of the proposed methods
In the first part of this study, a methodology was developed to be used for the calibration of ALS systems and the alignment of multiview ALS scans of urban areas. Although applicable to classical nadir configurations, the proposed approach is particularly suited to data from an oblique forward-looking laser scanner. A combination of a region-growing approach with a RANSAC estimation technique is used to extract planar shapes. Homologous planar shapes in overlapping point clouds are identified with regard to several geometric attributes. A new method is used for transferring the planarity constraints into systems of linear equations to achieve both the boresight calibration of the ALS system and the alignment of multiple data sets.
ALS scans that were obtained in the first step represent a solid basis and reference for change detection. The proposed framework for online comparison of ALS data extends the concept of occupancy grids known from robot mapping. However, instead of interpolating the data on raster cells, occupancy conflicts are identified at the exact position of the measured 3-D points. The change detection method is based on the representation of uncertainty and belief according to the Dempster-Shafer theory. Additional attributes are considered in order to decide whether changes are of man-made origin or occurring due to seasonal effects. All experiments regarding the calibration of the ALS system were successfully performed for widely different types of urban terrain. The concept of online change detection was tested using data of an urban test site where multiview ALS data were acquired at an interval of one year:
Results of automatic change detection (2008/2009)
Available data (test data)
The ALS data used in this study are publicly available: Abenberg data
Publications
- Hebel, M., Arens, M., Stilla, U., 2013. Change detection in urban areas by object-based analysis and on-the-fly comparison of multi-view ALS data. ISPRS Journal of Photogrammetry and Remote Sensing 86, pp. 52-64. [doi: 10.1016/j.isprsjprs.2013.09.005] [pdf]
- Hebel, M., Stilla, U., 2011. Simultaneous Calibration of ALS Systems and Alignment of Multiview LiDAR Scans of Urban Areas. IEEE Transactions on Geoscience and Remote Sensing, Volume 50 (6), ISSN 0196-2892, S. 2364-2379, Datum der Veröffentlichung (online): 18. November 2011, Datum der gedruckten Ausgabe: Juni 2012. [DOI: 10.1109/TGRS.2011.2171974] [publica]