Unser breites Kompetenzspektrum in der Unterwassersensorik, Sensordatenfusion, Umwelterfassung, autonomen Navigation und ferngesteuerten Unterwasserfahrzeugen ermöglicht uns die Erkundung maritimer Themen voranzutreiben. Mit unserer Expertise bewegen wir uns auf und unter dem Wasser, um dort unterschiedliche Aufgabenstellungen zu lösen. Unsere Systeme kommen zum Einsatz, wenn es um die präzise Kartierung des Meeresbodens, Entdeckung historischer Funde unter Wasser, Beseitigung von Mikroplastik im Meer, Wasserrettung mit Tauchrobotern, Optimierung von Unterwasserbildern, die Digitalisierung und Automatisierung von Wasserstraßen oder um die maritime Situations- und Lageerkennung geht.
Das sind unsere Leistungsbereiche:
(Mittels der Links springen Sie direkt zum entsprechenden Abschnitt weiter unten auf der Seite)
- Oberflächen- und Unterwasserfahrzeuge unterschiedlicher Autonomiegrade (remotely operated vehicles, ROV; autonomous surface/underwater vehicles, ASV/AUV), mit Kameras bzw. multisensoriell ausgestattet für unterschiedliche Missionen von der Rettung Ertrinkender über Kartierung, Objektdetektion und Vermessung bis hin zu Inspektions- und Wartungsaufgaben
- Optimierung von Unterwasserbildern und Erforschung optischer Unterwasserkommunikation
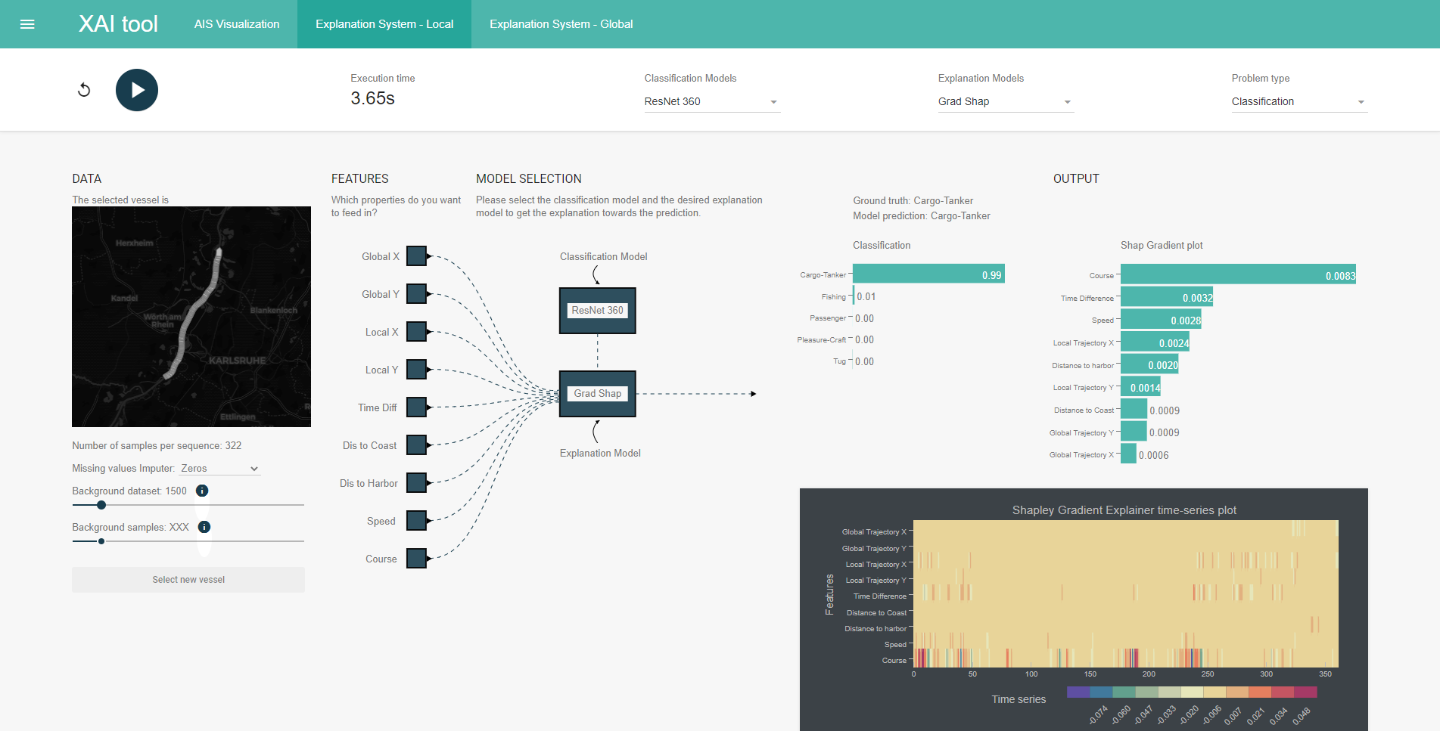
- Maritime Situationsanalyse und Erkennung von deren Objekten u. a. mit KI-gestützten Verfahren