Our broad range of expertise in underwater sensor technology, sensor data fusion, environmental sensing, autonomous navigation, and remotely operated underwater vehicles enables us to advance the exploration of maritime issues. With our expertise, we move on and under the water to solve different tasks there. Our systems are used for precise mapping of the seafloor, discovery of historical finds underwater, removal of microplastics in the sea, water rescue with diving robots, optimization of underwater images, digitization and automation of waterways or Maritime Situational Awareness (MSA).
These are our service areas:
(Using the links you will jump directly to the corresponding section further down the page.)
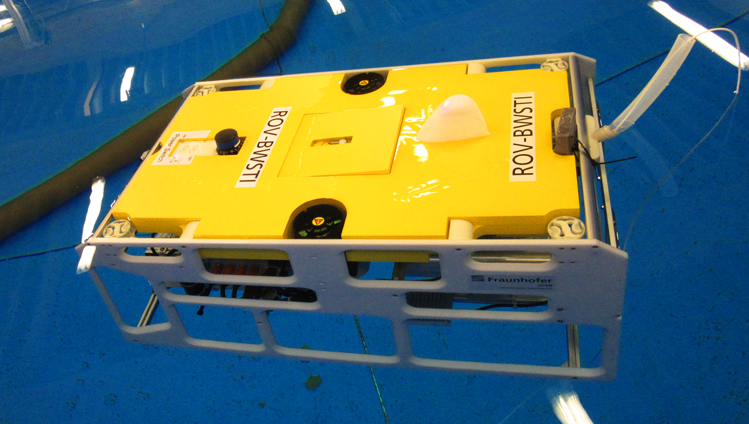
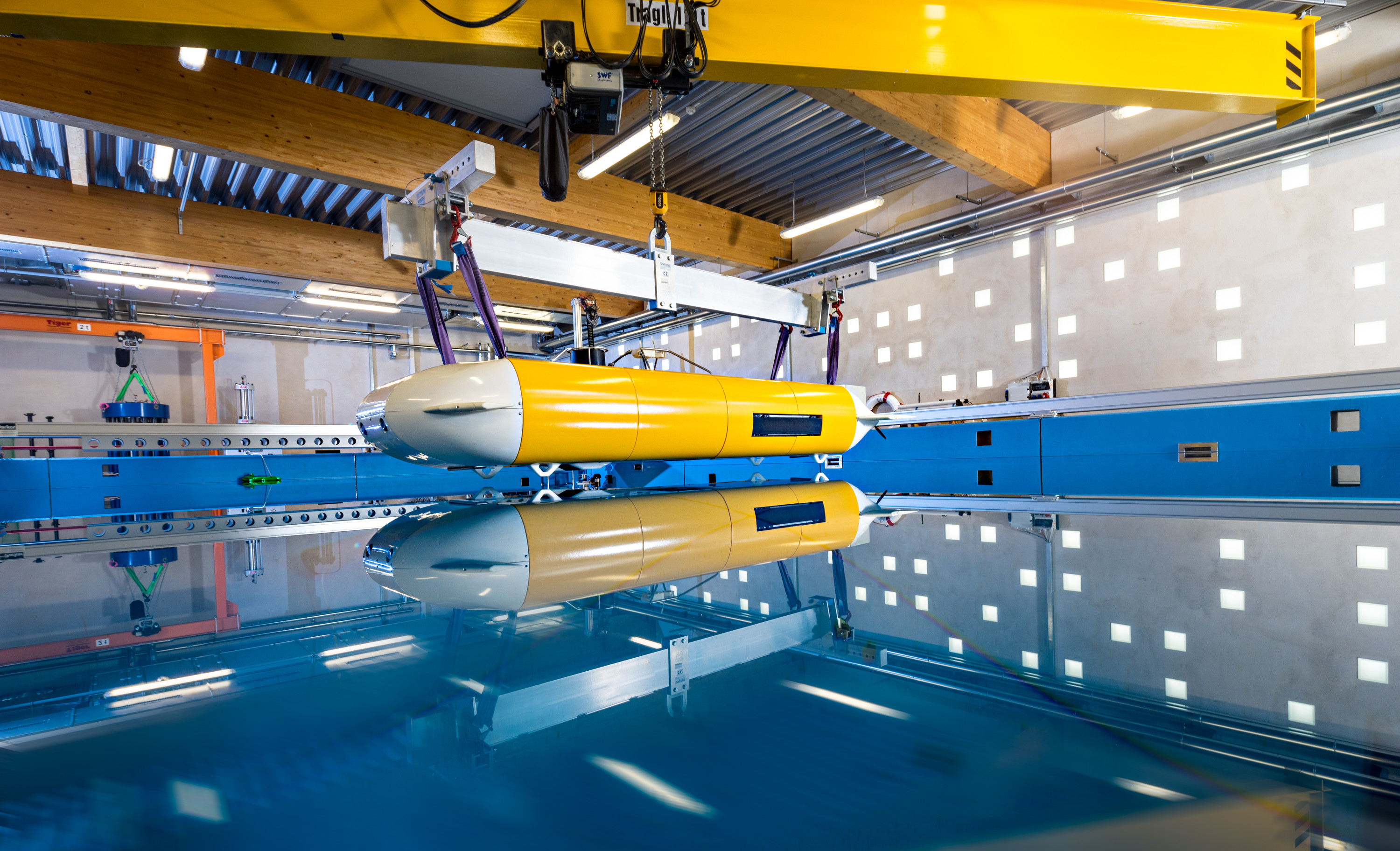
- Surface and underwater vehicles of various degrees of autonomy (remotely operated vehicles, ROV; autonomous surface/underwater vehicles, ASV/AUV), equipped with cameras or multisensory for different missions ranging from drowning rescue, mapping, object detection and surveying to inspection and maintenance tasks.
- Optimization of underwater imagery and exploration of underwater optical communications.
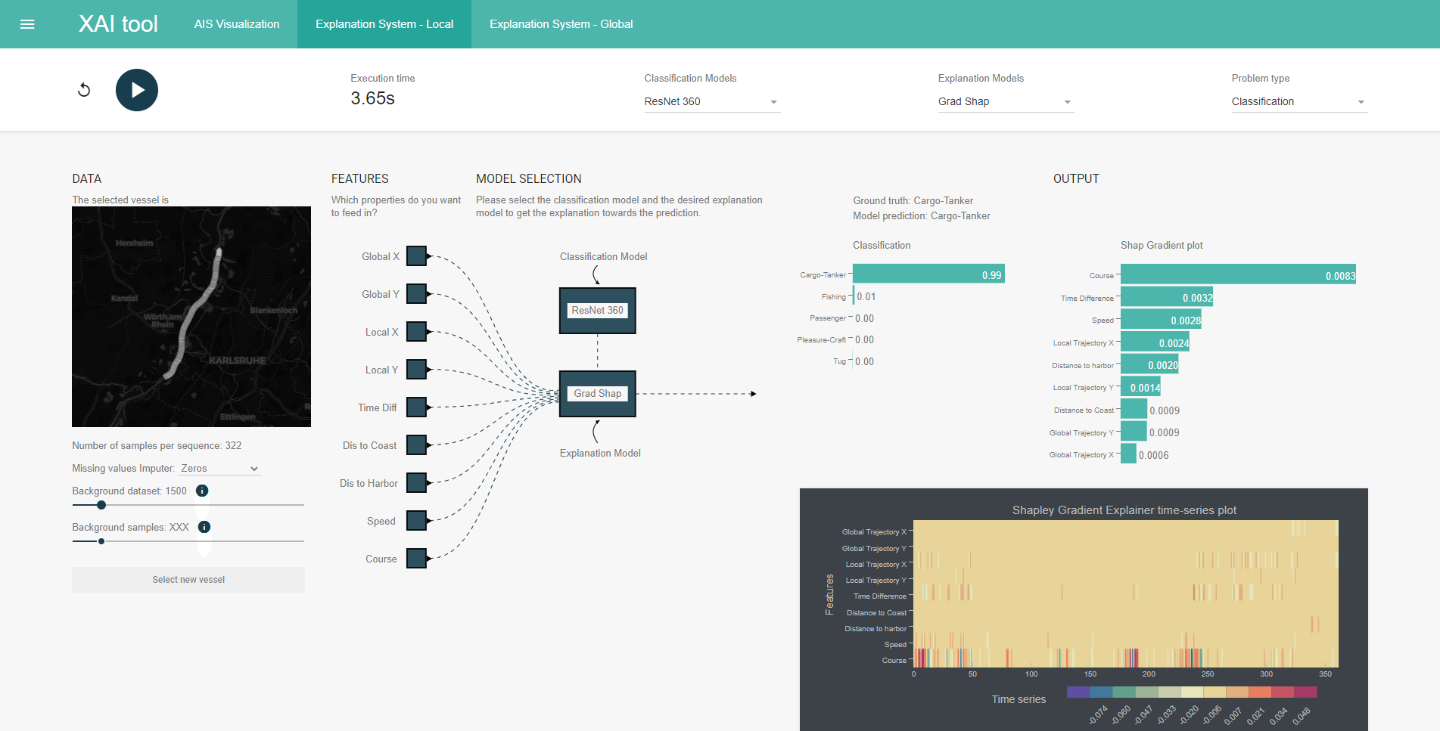
- Maritime situational awareness and detection of their objects using AI-based methods, among others.