


Motivation
The precise surveying of water bodies such as rivers or quarry ponds is a challenging task. Authorities and private harbor operators are required to provide an inventory of up-to-date maps such as riverbeds or harbor facilities. Usually, a large number of mapping vessels and trained personnel are required for this task. However, this is costly, so in many cases mapping is done too infrequently. A solution to this is offered by autonomous surface vessels (ASVs), which significantly reduce costs and the need for on-board personnel.
Project outcome
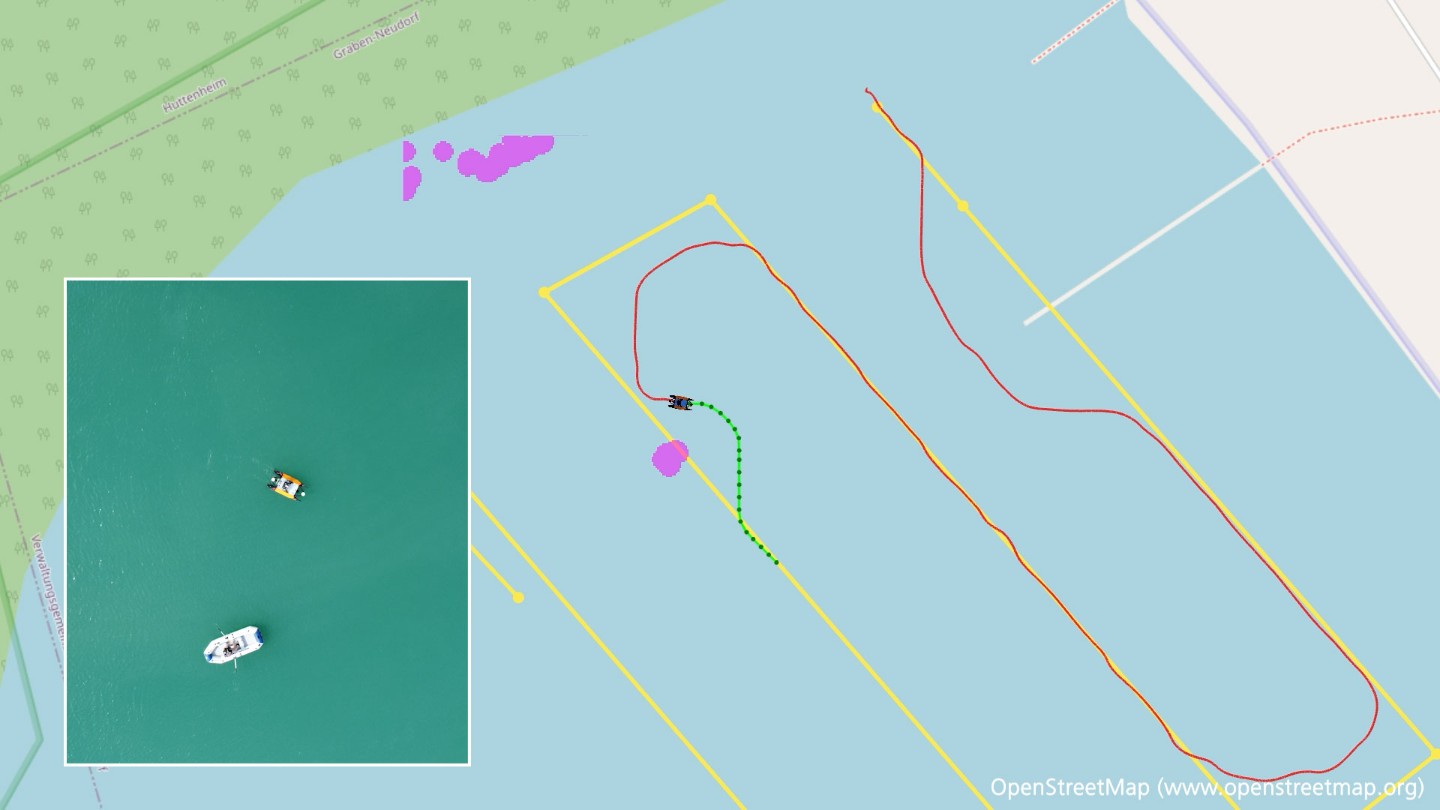
As part of a three-year in-house research project, Fraunhofer IOSB has developed an autonomous surface vessel that is capable of autonomously surveying a body of water to generate an associated 3D map. For this purpose, both the riverbed is recorded by means of sonar and shore areas and overwater structures by means of optical systems. The information obtained in this way is then fused and transferred into a joint 3D model of the surrounding area.
Exemplary use cases
The knowledge gained from the project can be applied in a variety of ways. Watercraft can be used for passenger and freight transport on the high seas, on inland waterways or for logistics chains involving waterways. This also includes the excavation of waterways and the autonomous measurement of navigation channels.

{kind=link}
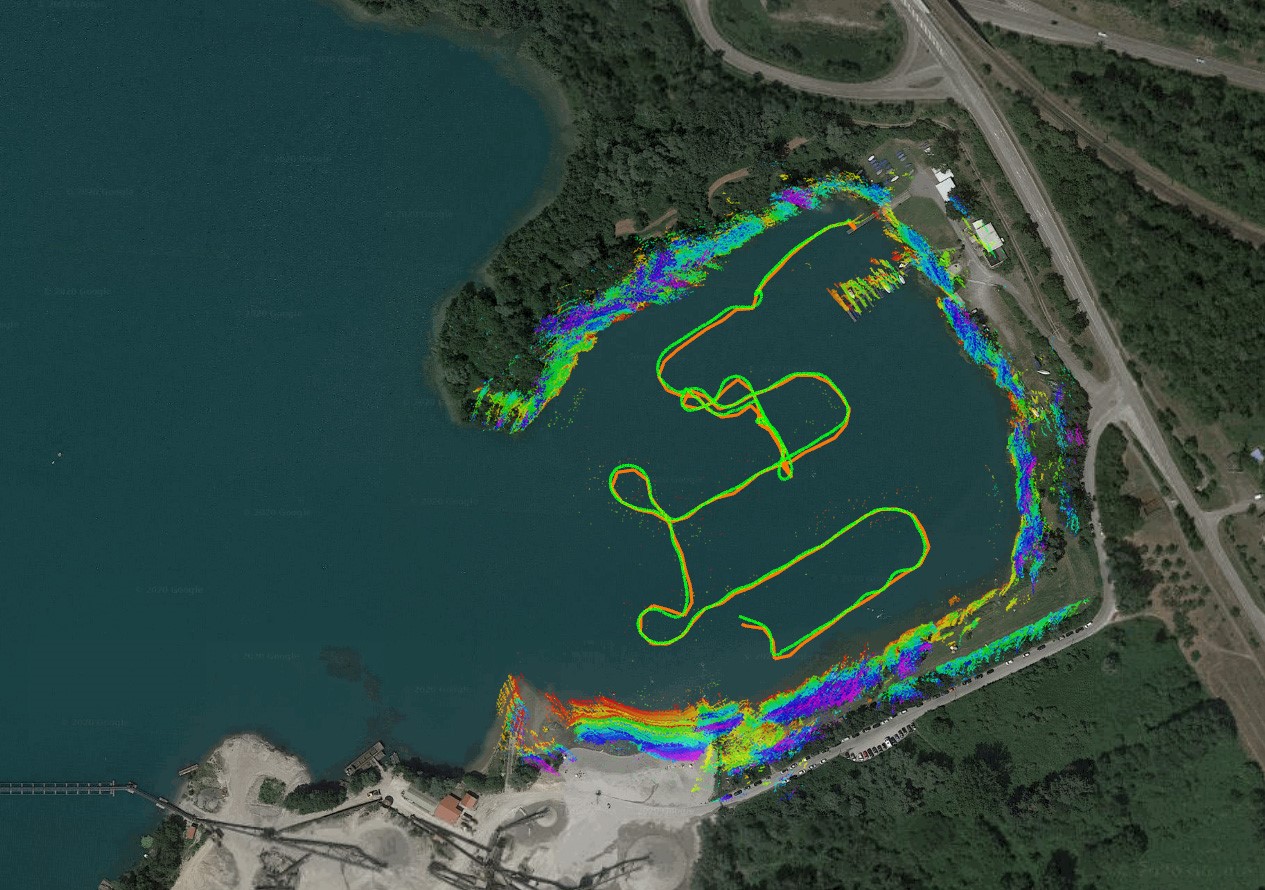
![Above water map based on camera data [ PNG 1.25 MB ]](/content/dam/iosb/iosbtest/bilder-videos/projekte/tep-taps/Überwasserkarte2.png){kind=link}