


Einsatz autonomer Robotersysteme
Autonome Robotersysteme können den Menschen auf vielfältige Art und Weise unterstützen. Sie agieren in gefährlichen oder unzugänglichen Umgebungen und entlasten den Menschen, indem sie monotone Arbeiten übernehmen. Die gegenwärtigen Anwendungen reichen hierbei von Assistenzrobotern im industriellen Umfeld über autonome schwere Arbeitsmaschinen in kontaminierten Gebieten bis hin zu Robotersystemen für Inspektions- und Explorationsaufgaben in der Tiefsee.
Anforderungen
Die Anforderungen an die Funktionalität autonomer Robotersysteme sind im Vergleich zu herkömmlichen Industrierobotern deutlich höher. Mobile Systeme sollen selbstständig in einer unbekannten und dynamischen Umgebung agieren und Nutzfunktionen erfüllen. Hierzu ist es unerlässlich, die Umwelt zu explorieren und in geeigneter Weise zu modellieren. Die mittels Sensoren aufgenommenen Informationen müssen zusammengeführt werden, sodass der Roboter auf dieser Basis eine genaue Bestimmung seiner Position durchführen kann. Zusätzlich muss die wahrgenommene Umgebung in eine exakte Kartenrepräsentation überführt werden. Diese Karte kann der Roboter dafür nutzen, kollisionsfrei zu einem Zielpunkt innerhalb des Einsatzgebiets zu fahren und dort Handhabungsaufgaben durchzuführen.
Lösungskonzept
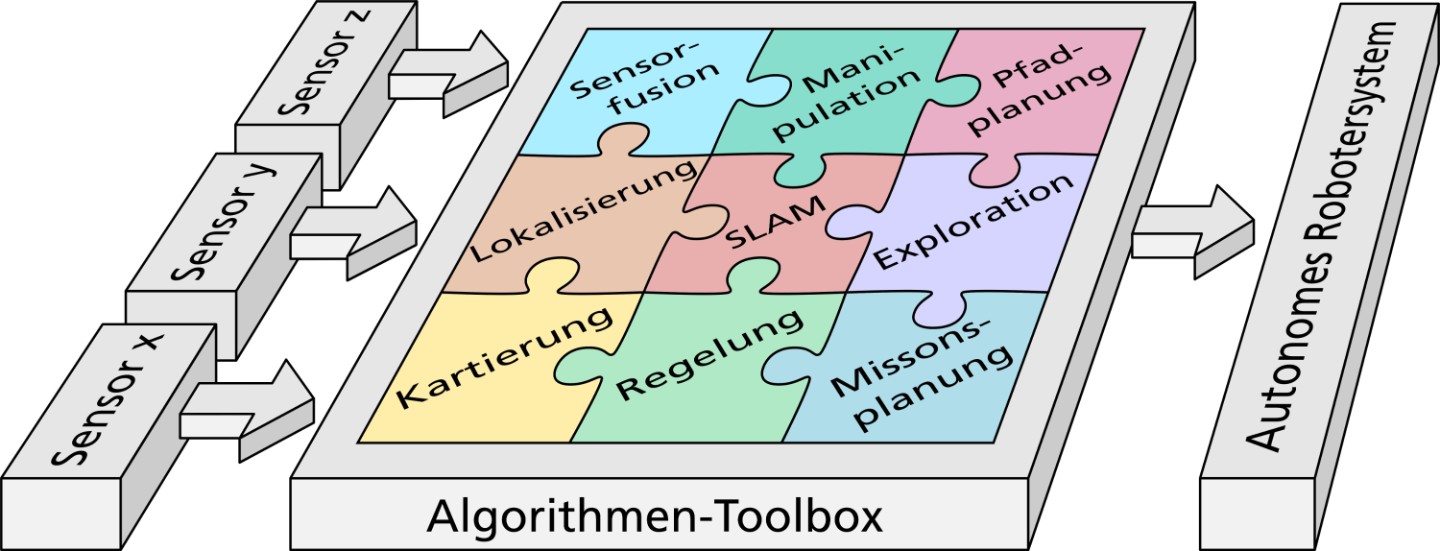
Um den vielfältigen Anforderungen an autonome Roboter gerecht zu werden, muss ein breites Spektrum an komplexen Teilfunktionen realisiert werden. Das Fraunhofer IOSB hat für die Umsetzung der Autonomiefunktionalität eine Vielzahl leistungsfähiger und robuster Algorithmen entwickelt. Hierzu werden Methoden der Multi-Sensor-Fusion, Regelungstechnik und künstlichen Intelligenz eingesetzt, wie z. B. Verfahren zur simultanen Lokalisierung / Kartenerstellung (simultaneous localization and mapping – SLAM), Pfadplanung in unstrukturiertem Gelände sowie Bahnplanung und Regelung für Manipulatoren.
Die unterschiedlichen Fähigkeiten lassen sich zwar in einzelnen Algorithmen realisieren, jedoch sind diese zum Teil stark voneinander abhängig. Das vom Fraunhofer IOSB verfolgte Konzept der »Algorithmen-Toolbox für autonome mobile Roboter« besteht darin, die Algorithmen in Form von modularen Komponenten zu entwickeln, sodass diese trotz der vorhandenen Abhängigkeiten flexibel einsetzbar sind. Dies erlaubt es, die Modulkonfiguration entsprechend der gewünschten Nutzfunktion für verschiedene Roboterplattformen, Umgebungen und Sensorausstattungen ohne großen Aufwand anzupassen.
Beispiel: Lokalisierung und Kartierung
Für die autonome Navigation ist es erforderlich, dass sich der mobile Roboter möglichst exakt mittels seiner Sensoren in seiner Umgebung lokalisieren kann. Hierfür können z. B. inkrementelle Messverfahren wie Radumdrehungssensoren und absolut messende Sensoren wie GPS und Kompass verwendet werden. Da Sensordaten häufig fehlerbehaftet sind, werden durch Multi-Sensor-Fusion die Messungen verschiedener Sensoren kombiniert, wodurch die Lokalisierungsgenauigkeit erhöht wird. Zusätzlich kann sich der mobile Roboter mittels weiterer Sensoren, welche die Umwelt wahrnehmen (Laserscanner, Kameras etc.), auch in einer Karte lokalisieren. In einer unbekannten Umgebung muss diese Karte jedoch zuerst vom Roboter erstellt werden. Aufgrund von Sensorunsicherheiten sind die anfängliche Lokalisierung und Karte zunächst noch ungenau. Die Herausforderung besteht nun darin, sowohl die Lokalisierung als auch die Karte fortlaufend durch die Fusion mit aktuellen Sensordaten zu verbessern. Am Fraunhofer IOSB wurden hierfür probabilistische SLAM-Verfahren entwickelt, welche die Abhängigkeiten und Unsicherheiten modellieren und das Erstellen einer präzisen Karte erlauben.
Beispiel: Pfadplanung
Eine effiziente Bewegungsplanung ist eine elementare Voraussetzung für die Autonomiefähigkeit von Robotersystemen. Im Vordergrund steht hierbei die Vermeidung von Kollisionen mit Objekten in der Umgebung. Hierzu müssen Hindernisse in Echtzeit dreidimensional erfasst und bei der Bewegungsplanung berücksichtigt werden. Die entwickelten Algorithmen beinhalten sowohl die Pfadplanung für mobile Roboter als auch die Bahnplanung für Manipulatoren. In die Planung kann eine Vielzahl von Optimierungskriterien einfließen, wie z. B. ein möglichst kurzer Pfad bzw. ein möglichst effizientes Greifen von Objekten. Eine integrierte Planung und Regelung für Manipulator und mobile Plattform erlaubt eine optimale Nutzung aller Freiheitsgrade des Robotersystems.
Fazit
Die »Algorithmen-Toolbox für autonome mobile Roboter« des Fraunhofer IOSB erlaubt es, ohne großen Anpassungsaufwand eine Vielzahl unterschiedlicher Roboterplattformen mit den für ihren jeweiligen Einsatzzweck relevanten Autonomiefähigkeiten auszustatten. Kundenspezifische Erweiterungen für Anwendungen im In- und Outdoor-Bereich können dank des modularen Konzeptes flexibel integriert werden.