Eine wesentliche Komponente autonomer Systeme sind Verfahren zur autonomen Umgebungserfassung, Positionsbestimmung sowie zur statischen und dynamischen Bahnplanung. Für die selbständige Umgebungserfassung sind die Daten unterschiedlicher Sensoren aufzubereiten und in Umgebungsmodelle zu überführen. KI-Verfahren helfen hier, um z. B. aus Kamerabildern und Laserdaten Befahrbarkeitskarten abzuleiten. Wir verfügen über leistungsfähige Verfahren der Sensordatenfusion und des Simulataneous Localization and Mapping (SLAM), um aufgaben- und umgebungsspezifisch eine optimale Umgebungserfassung und Navigation zu ermöglichen. Diese Grundlage nutzen unsere Algorithmen zur Bewegungsplanung, um Robotersysteme optimal in den unterschiedlichsten Umgebungen (strukturiert, unstrukturiert, unter Wasser) zu steuern.
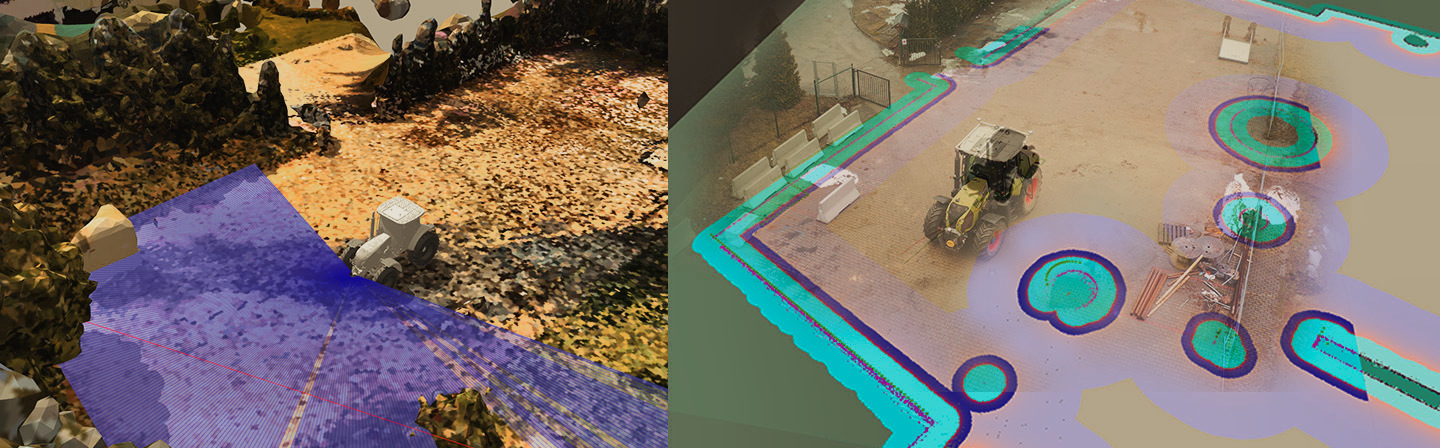
Autonome Systeme / Robotik
© Fraunhofer IOSB