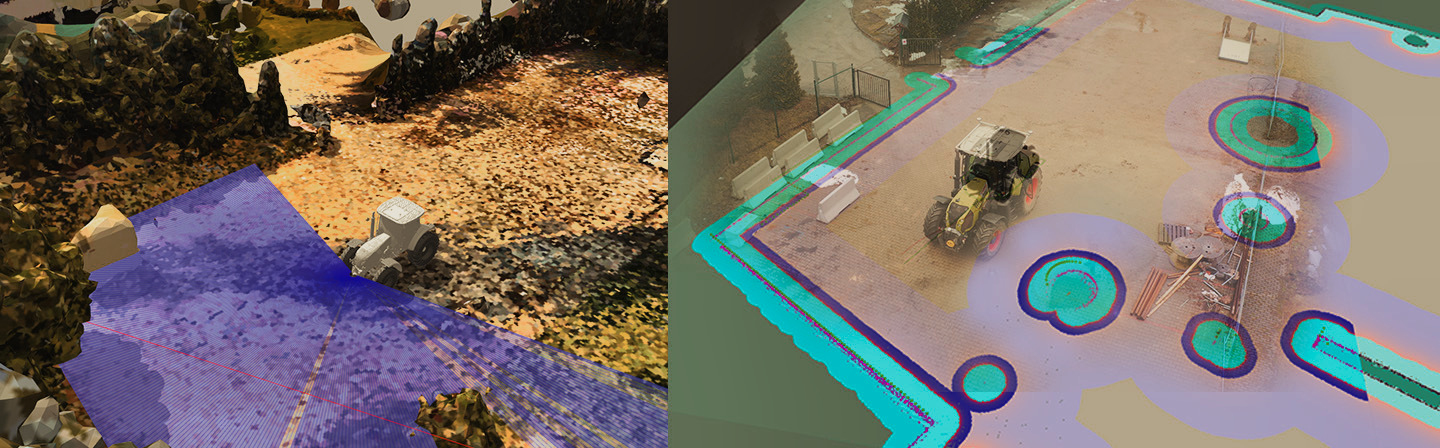
An essential component of autonomous systems are methods for autonomous environment perception, position estimation as well as static and dynamic path planning. For autonomous environment detection, the data of different sensors have to be processed and transferred into environment models. AI methods help here, for example, to derive driveability maps from camera images and laser data. We have at our disposal powerful methods of sensor data fusion and Simulataneous Localization and Mapping (SLAM) to enable task- and environment-specific optimal environmental detection and navigation. This basis is used by our motion planning algorithms to optimally control robot systems in a wide variety of environments (structured, unstructured, underwater).
Autonomous systems / robotics
© Fraunhofer IOSB