Testdaten für mobiles Laserscanning: "TUM-MLS-2018"
Am 19. Dezember 2018 wurden erneut mithilfe eines Sensorfahrzeugs des Fraunhofer IOSB Sensordaten mobiler Laserscanner (MLS) vom Stammgelände der TU München erfasst (48.1493° N, 11.5685° E). Bei der vorliegenden Messfahrt resultierte dies in über 10500 Einzelscans (Rotationen des Scankopfs) jedes der beiden Velodyne HDL-64E Laserscanner des Sensorsystems. Das Video unten zeigt eine Visualisierung des Ablaufs eines Teils dieser Messfahrt, wobei jeder gemessene 3D-Punkt dort grauwertkodiert ist entsprechend der gemessenen Intensität des Pulsechos. Die direkte Georeferenzierung der Laserscannerdaten wurde mithilfe eines Applanix POS LV Inertialnavigationssystems durchgeführt. Zusätzlich zu den Koordinaten der Messpunkte enthält der Datensatz auch die jeweils zugehörigen Sensorpositionen. In Ergänzung zur INS-/GNSS-basierten Georeferenzierung wurde eine einfache Methode zur Feinregistrierung angewendet (Schleifenschlüsse und Registrierung zum Datensatz "TUM-MLS-2016"). Die Ergebnisse dieser Registrierung sind Verschiebungsvektoren pro Scan, die separat abgelegt sind und die ggf. durch Resultate besserer Registrierungsmethoden ersetzt werden können.
Die hier verfügbaren MLS-Daten sind für die Verfahrensentwicklung im Bereich der 3D-Objekterkennung geeignet, aber auch für Untersuchungen im Bereich LiDAR-SLAM und für zahlreiche andere Anwendungen von Laserdaten urbaner Gebiete, z. B. für Untersuchungen zur Stadtmodellerstellung. In Kombination mit dem Datensatz "TUM-MLS-2016" lassen sich 3D-Änderungsdetektionsverfahren entwickeln und untersuchen.
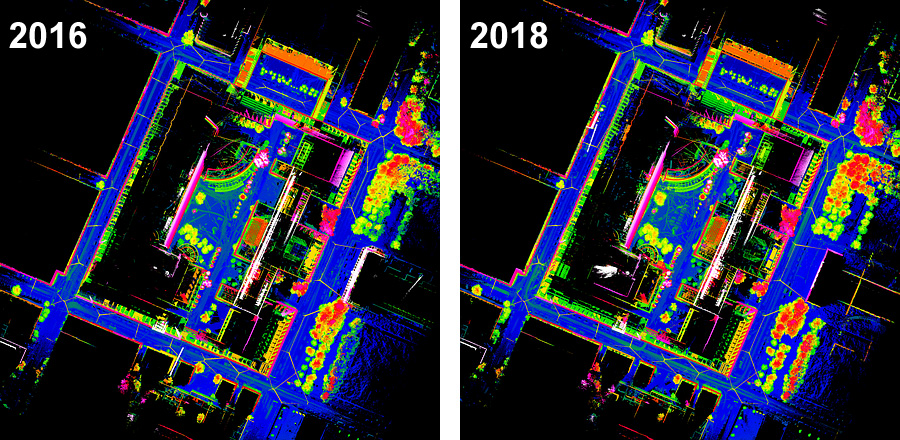
Gegenüberstellung von Draufsichten auf die beiden Datensätze "TUM-MLS-2016" und "TUM-MLS-2018". Farbcodierung entsprechend der Höhe.
Das Urheberrecht hinsichtlich der Daten liegt bei Fraunhofer IOSB. Die Daten werden unter der Lizenz "Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License (CC BY-NC-SA 4.0)" zur Verfügung gestellt.
Bei der Verwendung der Daten z. B. in Publikationen sollen folgende Artikel zitiert werden:
- Gehrung, J., Hebel, M., Arens, M., Stilla, U., 2017. An approach to extract moving objects from MLS data using a volumetric background representation. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume IV-1/W1, pp. 107-114. [doi: 10.5194/isprs-annals-IV-1-W1-107-2017]
- Zhu, J., Gehrung, J., Huang, R., Borgmann, B., Sun, Z., Hoegner, L., Hebel, M., Xu, Y., Stilla, U., 2020. TUM-MLS-2016: An Annotated Mobile LiDAR Dataset of the TUM City Campus for Semantic Point Cloud Interpretation in Urban Areas. Remote Sens. 2020, 12, 1875. [doi: 10.3390/rs12111875]
Details des Datenformats sind in einer Readme-Datei beschrieben (in Englisch).
Der Datensatz besteht aus ca. 2 Milliarden 3D-Punkten in 21170 .pcd Dateien (17 Minuten Messfahrt) und belegt 73 GB Speicherplatz. Zum Herunterladen der Daten können Zugangsinformationen zu einem FTP-Server angefragt werden. Ansprechperson hierfür ist Marcus Hebel (marcus.hebel@iosb.fraunhofer.de). Ein kleiner Einblick in die Daten (3 Sekunden) kann als .zip-Datei heruntergeladen werden.
Wer bereits Zugangsdaten für den ersten Datensatz "TUM-MLS-2016" erhalten hat, braucht nur die "1" im Benutzernamen durch eine "2" zu ersetzen. Das jeweilige Zugangspasswort ist dasselbe.
Hinweis: Seit Februar 2023 hat sich die Adresse des ftp-Servers geändert. Sie lautet nun ftps.iosb.fraunhofer.de. Die Verbindung muss via FTP über SSL/TLS mit impliziter Verschlüsselung erfolgen (FTPS, Port 990). FTP-Clients, die diese Art der Verbindung unterstützen, sind z. B. FileZilla oder WinSCP. Die zuvor bereits verteilten Benutzernamen und Passwörter behalten ihre Gültigkeit.
Semantische Annotation
Ein Teil der 3D-Daten des Testdatensatzes "TUM-MLS-2018" wurde an der Technischen Universität München, Professur für Photogrammetrie und Fernerkundung (TUM-PF) manuell mit Labels versehen. Bei den Klassen handelt es sich um die folgenden: Unlabeled (0), Artificial Terrain (1), Natural Terrain (2), High Vegetation (3), Low Vegetation (4), Building (5), Hardscape (6), Artefact (7) und Vehicle (8). Zusätzlich sind auch einzelne Objektinstanzen annotiert. Auf dem FTP-Server befinden sich die zugehörigen Metadaten im Unterordner ./Labels_version-2020. Das folgende Video gibt einen Eindruck von der Zuweisung der 3D-Punkte zu den einzelnen Instanzen.
Zeitgleich aufgenommene Wärmebilder
Eine von einer Infrarotkamera aufgenommene Bildfolge wurde dem Datensatz hinzugefügt. Bei der Kamera handelte es sich um eine Mikrobolometer-Kamera, welche seitlich zur Fahrtrichtung angebracht war. Die Einzelbilder der Bildfolge werden auf dem FTP-Server als 16-bit TIFF-Dateien zur Verfügung gestellt. Insgesamt beinhaltet die Bildfolge 26014 Einzelbilder (15 GB). Erneut kann ein kleiner Einblick in die Daten (3 Sekunden) als .zip-Datei heruntergeladen werden.

Weitere Epoche: TUM-ALS-2009
Den Testdaten für mobiles Laserscanning TUM-MLS-2016 und TUM-MLS-2018 wurden ALS-Daten (Airborne Laser Scanning) aus dem Jahr 2009 hinzugefügt. Hierdurch eröffnen sich weitere Untersuchungsmöglichkeiten, u.a. für die Änderungsdetektion und -analyse. Die ALS-Daten sind auf dem FTP-Server des Datensatzes "TUM-MLS-2016" im Unterordner .⁄als2009 zu finden.
Computergenerierte Ansicht der ALS-Daten (Airborne Laser Scanning) aus dem Jahr 2009.