Das SPARC-Konzept für vollautomatisches Fahren
Die Problemstellung
Ein vollautomatisches Fahrzeug soll mit serienfähigen Mitteln den Innenstadtverkehr bis 50 km/h ohne Fahrer bewältigen können. Eine künstliche Intelligenz soll hierbei die Verkehrssituation analysieren, und eine sichere sowie regelkonforme Trajektorie finden und ausführen.
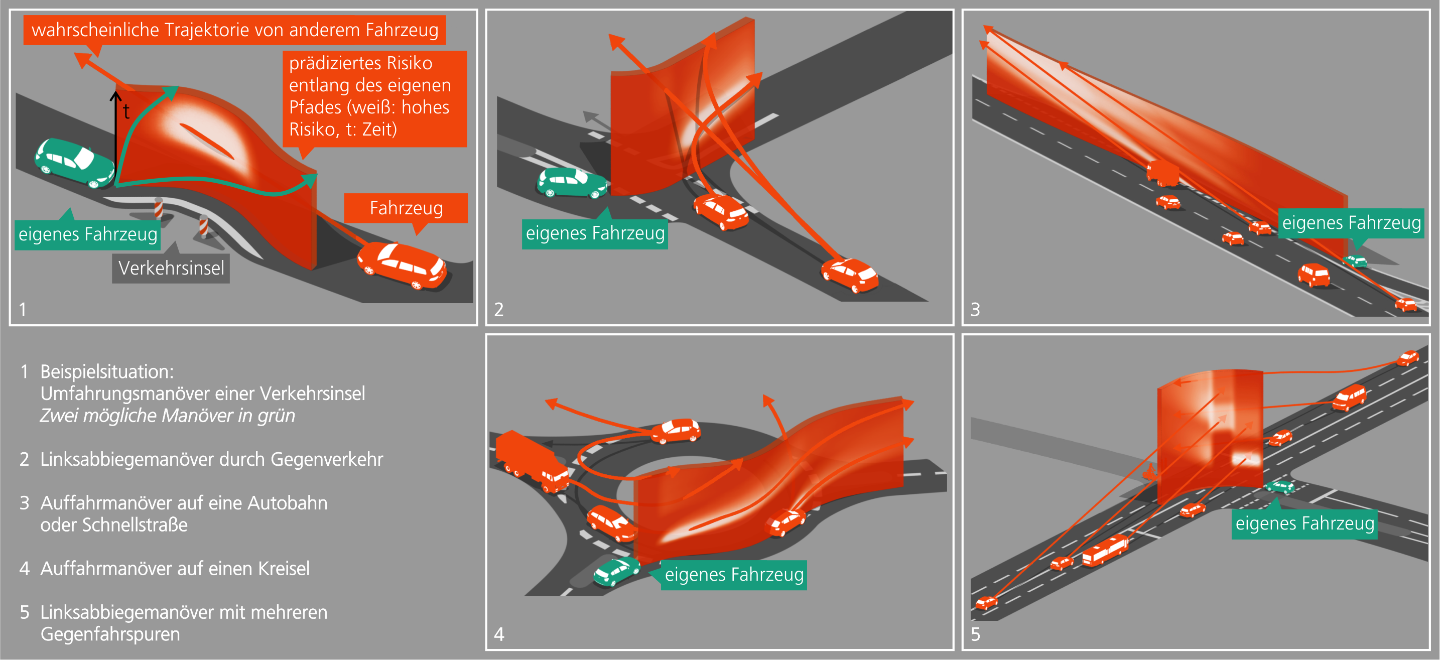
Durch die Komplexität innerstädtischer Verkehrssituationen ist eine Klassifikation der Situationen in diskrete Zustände nur eingeschränkt möglich. Die hohe Anzahl an statischen und dynamischen Objekten ergibt viele Möglichkeiten, wie sich eine gegebene Situation entwickeln kann. Die künstliche Intelligenz des vollautomatischen Fahrzeugs muss diese Eventualitäten analysieren und daraus abgeleitete Reaktionsanweisungen vorhalten, um eine entstehende Situation sicher und im Einklang mit geltenden Verkehrsregeln zu bewältigen.
Das Verhalten der anderen Verkehrsteilnehmer muss prädiziert werden, wobei die Modellierung der Bewegungsmuster bereits durch Messunsicherheiten eine anspruchsvolle Aufgabe darstellt. Darüber hinaus besteht eine wesentliche Ungewissheit über das zukünftige Verhalten der Verkehrsteilnehmer, das maßgeblich von der aktuellen Situation abhängt.
Die künstliche Intelligenz muss diese unterschiedlichen Einflussfaktoren erfassen, analysieren und aus der Gesamtheit der Informationen eine angemessene Reaktion des vollautomatischen Fahrzeugs ableiten. Die künstliche Intelligenz des vollautomatischen Fahrzeugs muss in komplexen Situationen eine sichere, regelkonforme und für die Insassen komfortable Trajektorie finden und diese ausführen. Hierbei muss das vollautomatische Fahrzeug auf unvorhergesehene Situationen reagieren können, die auf unvollständige Informationen über die Umgebung und Ungewissheit über Verhalten anderer Verkehrsteilnehmer zurückzuführen sind.
Das SPARC-Konzept als Lösung
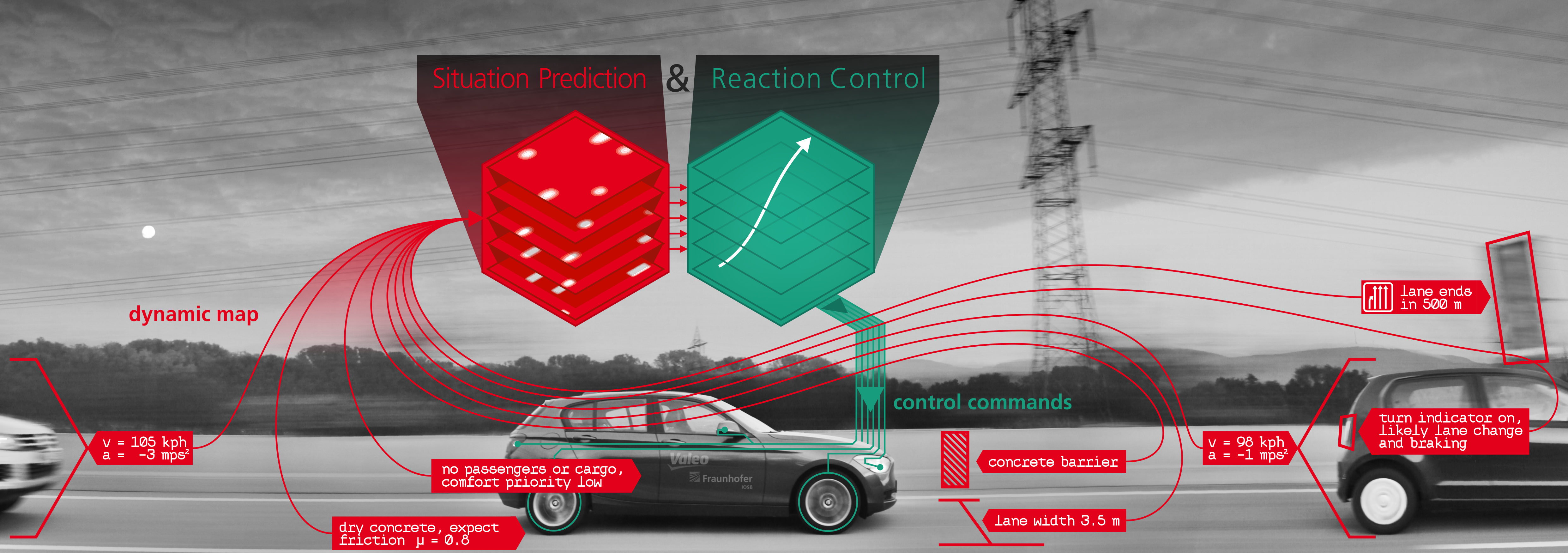
Um der Komplexität der Aufgabenstellung gerecht zu werden, setzt die hier vorgestellte künstliche Intelligenz – Situation Prediction and Reaction Control – auf eine ganzheitliche Betrachtungsweise des Problems. Die übliche strikt getrennte Aufteilung zwischen den Systemkomponenten zur Analyse und Einordnung der Situation, und der Planung und Exekution des Manövers, wird hierbei durch eine holistische Repräsentation aller analysierten Informationen aufgelöst.
Die künstliche Intelligenz des vollautomatischen Fahrzeugs verwendet alle von anderen Systemkomponenten zur Verfügung gestellten Informationen über die Umgebung. Hierzu zählen unter anderem Informationen über statische und dynamische Hindernisse, Fahrspuren, Verkehrsschilder und -regeln, sowie Navigationsanweisungen.
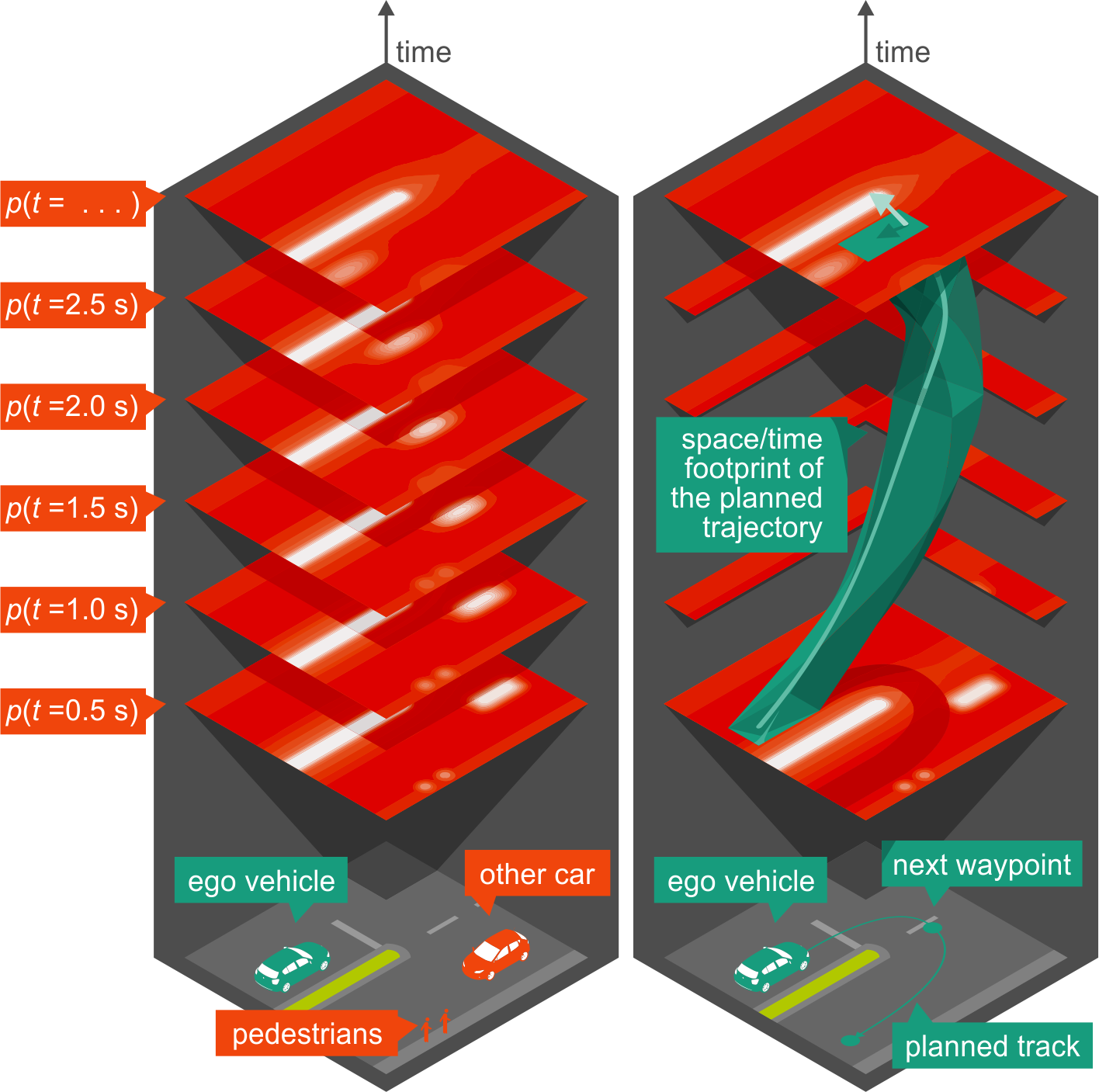
Der erste Teilbereich der künstlichen Intelligenz – die Situation Prediction – führt mit diesen Informationen stochastische Analysen der Situation durch, die die Informationsqualität explizit berücksichtigt. Das Verhalten dynamischer Verkehrsteilnehmer wird über Wahrscheinlichkeitsdichten in die Zukunft prädiziert. Dadurch ergibt sich eine umfassende Beschreibung des Fahrzeugumfeldes und dessen potenzieller zeitlicher Entwicklung. Alle Informationen werden fusioniert und zur Weiterverwendung in einer dedizierten Darstellungsform abgelegt – der Holistic Representation.
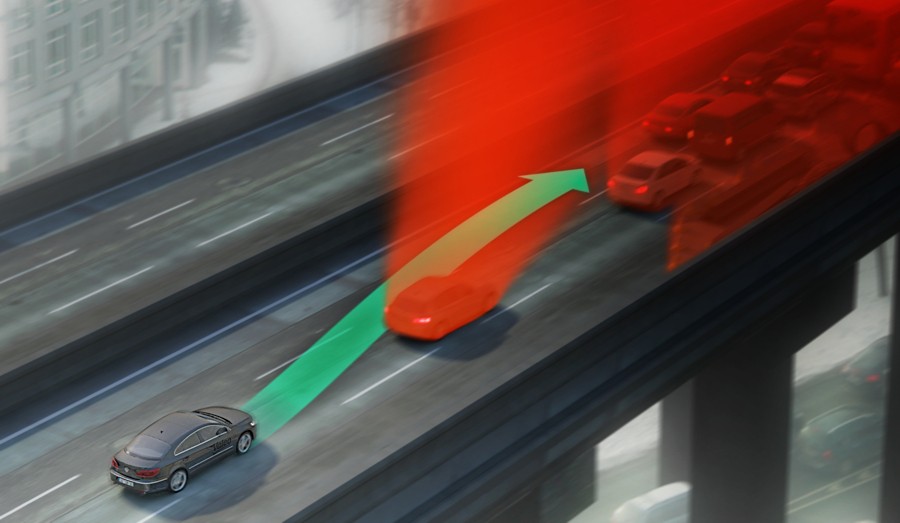
Zusammen mit den Dynamikeigenschaften des Fahrzeugs dienen die somit fusionierten Umfeldinformationen dem zweiten Teil der künstlichen Intelligenz – der Reaction Control – zur Planung der optimalen Trajektorie. Die hierfür verwendeten Optimierungsverfahren betrachten neben dem Hauptziel, eine sichere und regelkonforme Trajektorie durch Raum und Zeit zu finden, auch sekundäre Ziele, wie beispielsweise die Maximierung von Fahrkomfort und die Minimierung des Kraftstoffverbauchs. Eine frei wählbare Gewichtung erlaubt es, alle Ziele in unterschiedlichem Maß gleichzeitig einzubeziehen, und Zielkonflikte nachvollziehbar und klar reguliert aufzulösen. Zur Auflösung von Verkehrssituationen, die mehre Handlungen des vollautomatischen Fahrzeugs ermöglichen, wurde SPARC um eine globale Lösungsmethodik erweitert.
Die Trajektorienplanung ergibt Regelbefehle zur Steuerung des vollautomatischen Fahrzeugs, die an die Aktuatoren weitergegeben werden.
Um falsche oder fehlende Umgebungsinformationen oder unerwartete Ereignisse zu kompensieren, und auch in diesen Fällen eine sichere Trajektorie abzufahren, erfolgt die Analyse der Situation und Berechnung der optimalen Trajektorie zyklisch, sodass eine schnelle Reaktion auf unvorhergesehene Änderungen möglich wird.