The SPARC concept for fully automatic driving

The problem
A fully automatic vehicle should be able to cope with inner-city traffic up to 50 km/h without a driver, using series-produced means. An artificial intelligence is to analyze the traffic situation and find and execute a safe and rule-compliant trajectory.
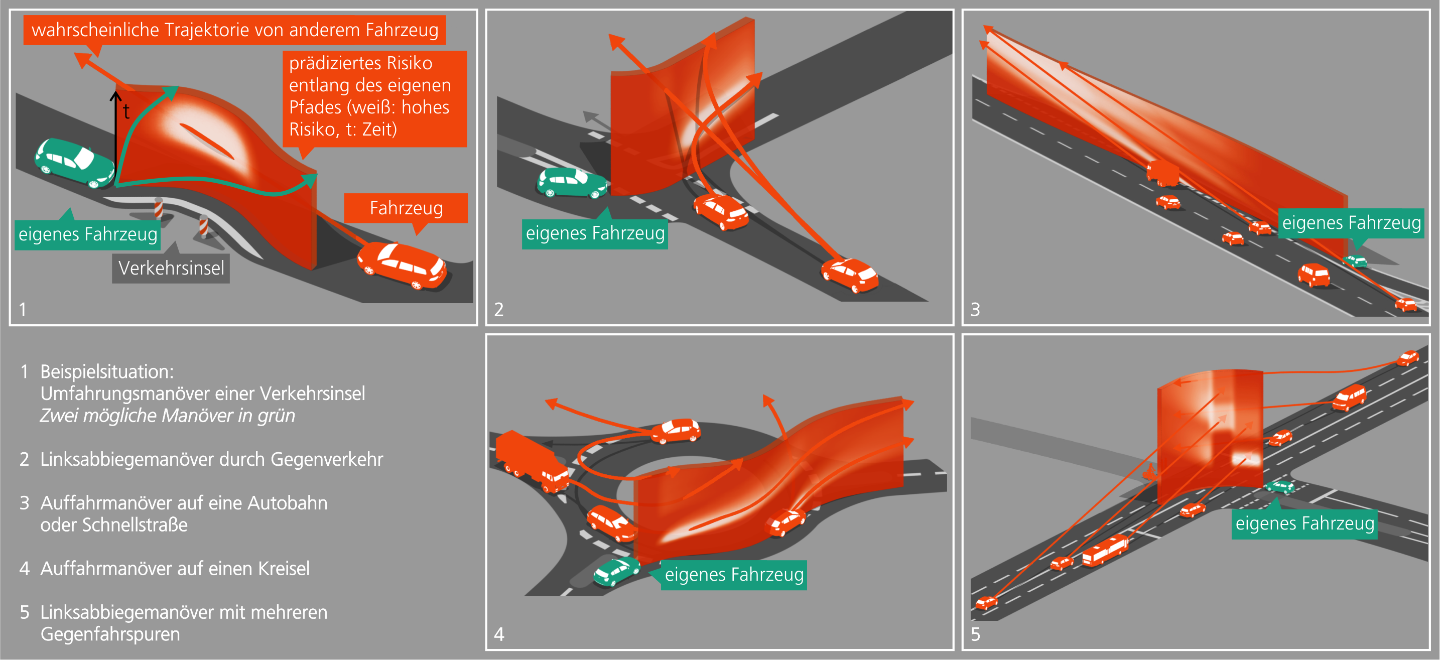
Due to the complexity of inner-city traffic situations, a classification of situations into discrete states is only possible to a limited extent. The high number of static and dynamic objects results in many possibilities how a given situation can develop. The artificial intelligence of the fully automatic vehicle has to analyze these contingencies and provide derived reaction instructions in order to manage an emerging situation safely and in accordance with applicable traffic rules.
The behavior of the other road users must be predicted, whereby the modeling of the movement patterns is a challenging task, even with measurement uncertainties. In addition, there is a considerable uncertainty about the future behavior of road users, which depends largely on the current situation.
Artificial intelligence must record and analyze these different influencing factors and derive an appropriate response of the fully automatic vehicle from the totality of the information. In complex situations, the artificial intelligence of the fully automatic vehicle has to find and execute a safe trajectory that conforms to the rules and is comfortable for the occupants. The fully automatic vehicle must be able to react to unforeseen situations resulting from incomplete information about the environment and uncertainty about the behaviour of other road users.
The SPARC concept as a solution
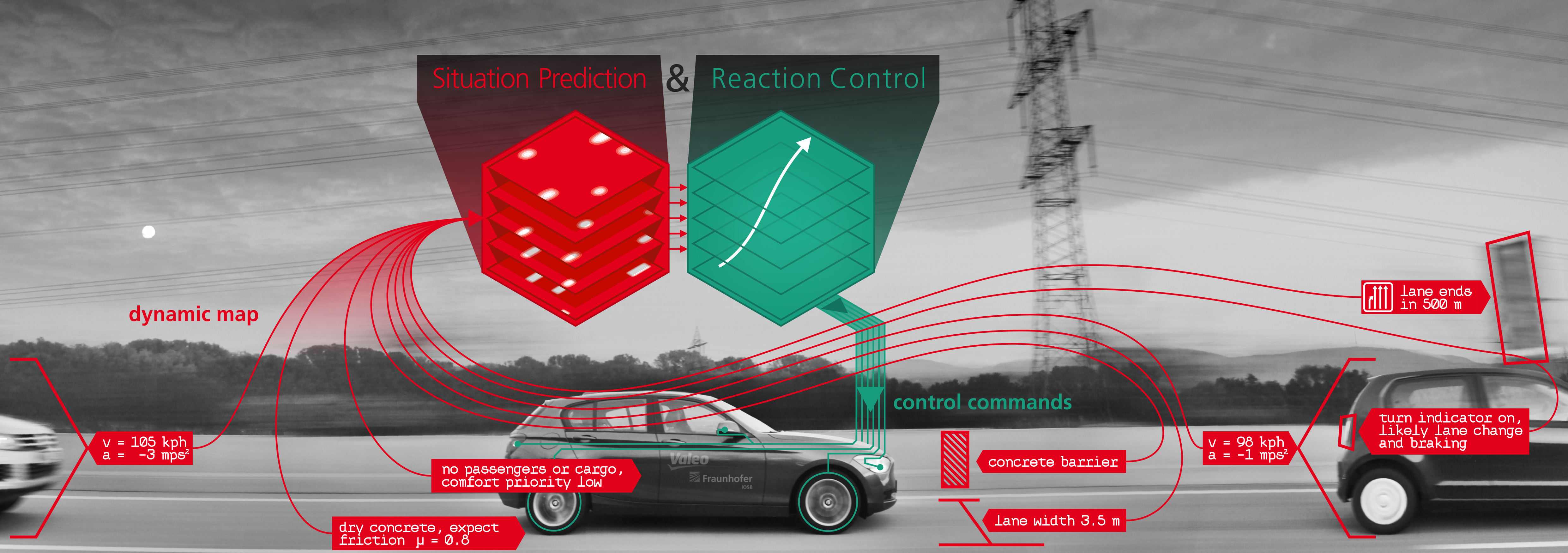
In order to do justice to the complexity of the task, the artificial intelligence presented here - Situation Prediction and Reaction Control - relies on a holistic approach to the problem. The usual strictly separated division between the system components for the analysis and classification of the situation, and the planning and execution of the maneuver, is resolved by a holistic representation of all analyzed information.
The artificial intelligence of the fully automatic vehicle uses all information about the environment provided by other system components. This includes information about static and dynamic obstacles, lanes, traffic signs and rules, and navigation instructions.
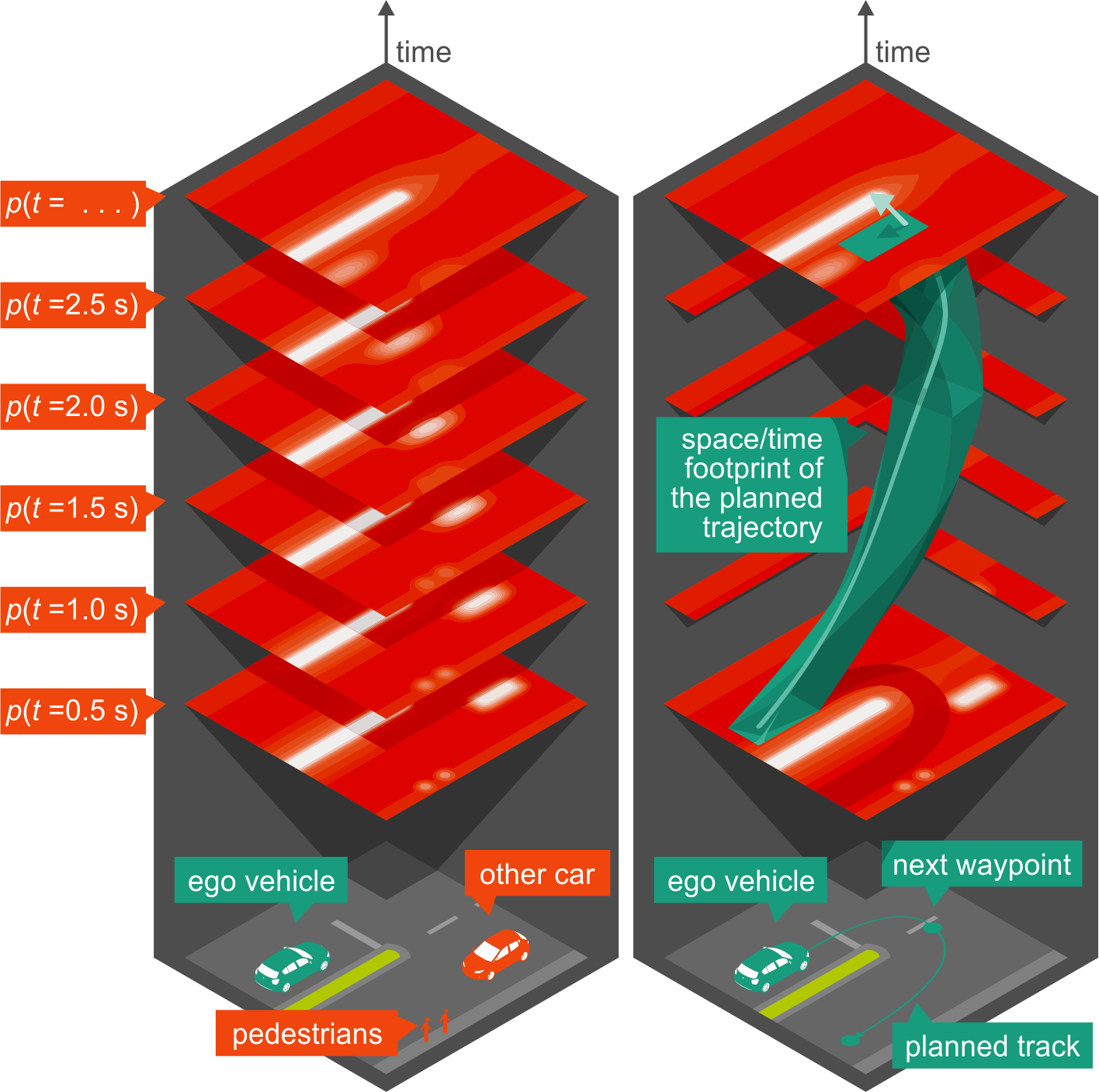
The first sub-area of artificial intelligence - Situation Prediction - uses this information to perform stochastic analyses of the situation, explicitly taking into account the quality of the information. The behavior of dynamic road users is predicted into the future using probability densities. This results in a comprehensive description of the vehicle environment and its potential development over time. All information is merged and stored for further use in a dedicated representation form - the Holistic Representation.
Together with the dynamic properties of the vehicle, the thus fused environment information serves the second part of the artificial intelligence - the reaction control - to plan the optimal trajectory. In addition to the main goal of finding a safe and rule-compliant trajectory through space and time, the optimization methods used for this purpose also consider secondary goals, such as maximizing driving comfort and minimizing fuel consumption. A freely selectable weighting allows all objectives to be included to varying degrees at the same time and to resolve conflicts of objectives in a comprehensible and clearly regulated manner. For the resolution of traffic situations that allow multiple actions of the fully automatic vehicle, SPARC was extended by a global solution methodology.
The trajectory planning results in control commands for the control of the fully automatic vehicle, which are passed on to the actuators.
In order to compensate for incorrect or missing environmental information or unexpected events, and also to run a safe trajectory in these cases, the analysis of the situation and calculation of the optimal trajectory is performed cyclically, so that a quick reaction to unforeseen changes is possible.