
Challenges
To maximize the benefits of unmanned mobile ISR systems, the best possible strategy for efficient data acquisition is essential. In particular, the movements of the mobile platforms must be carefully planned for this purpose.
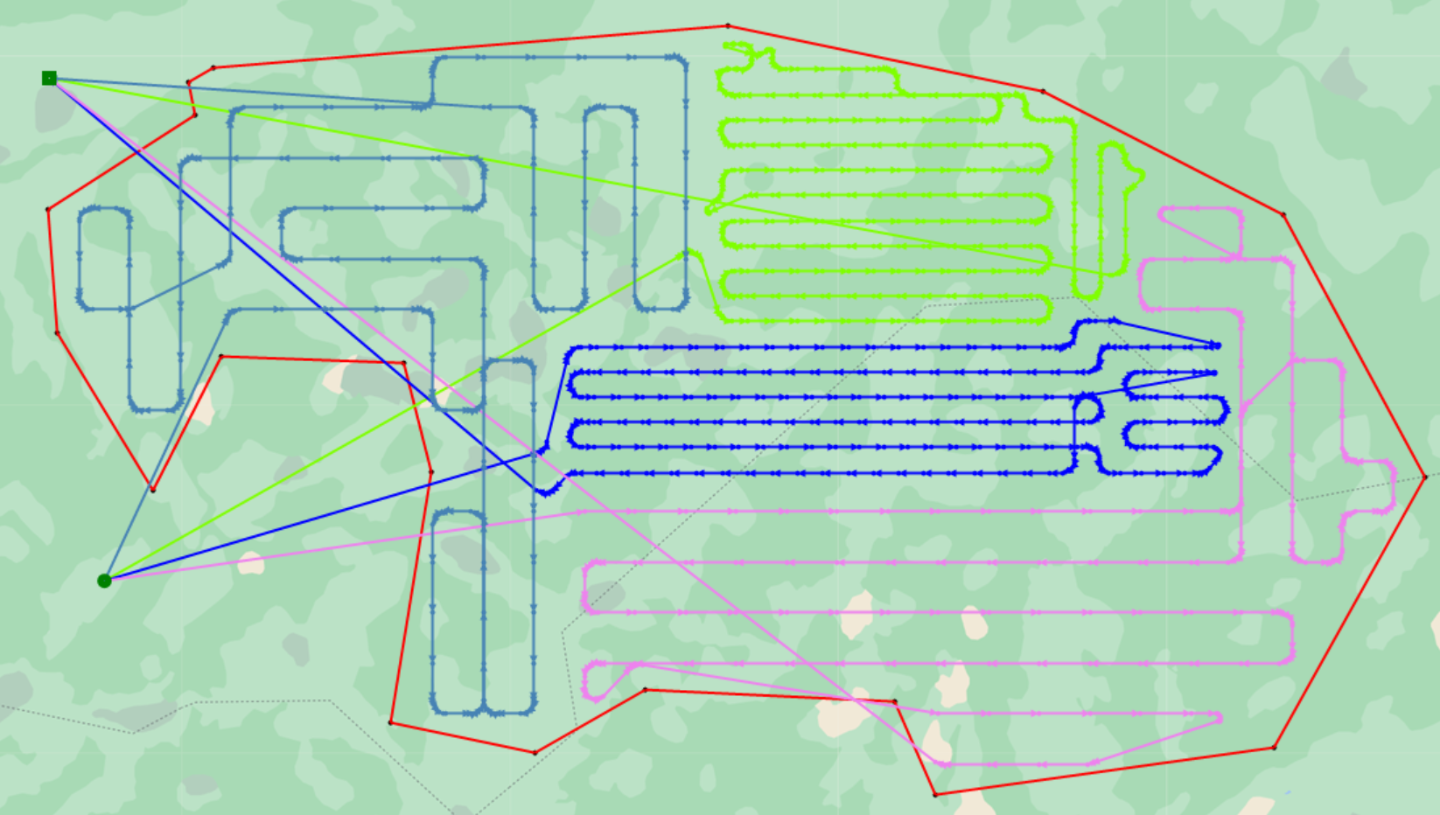
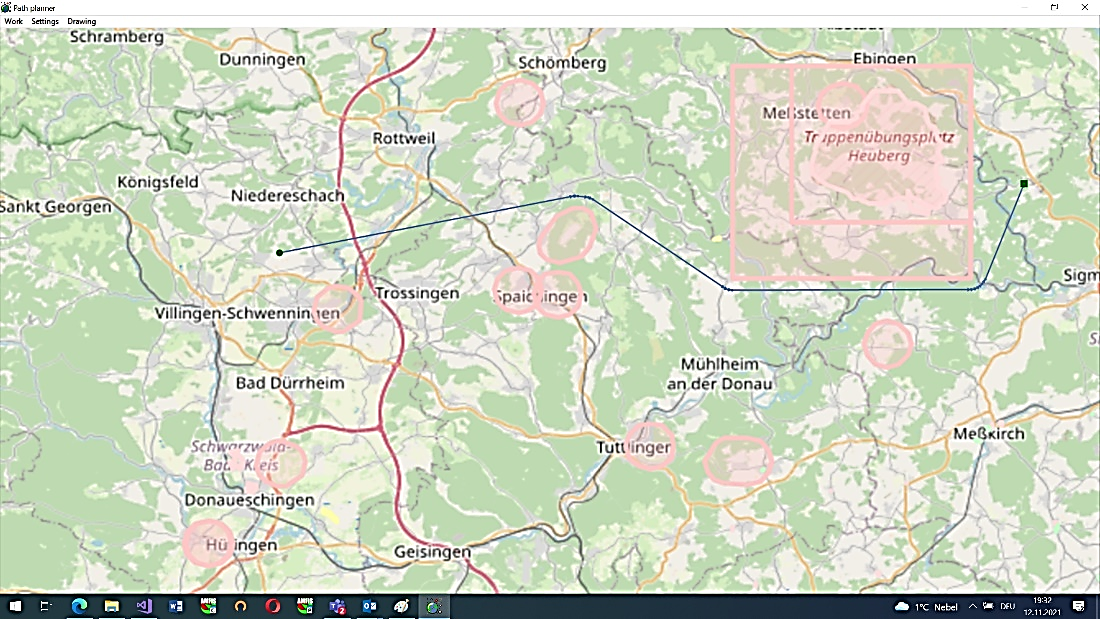
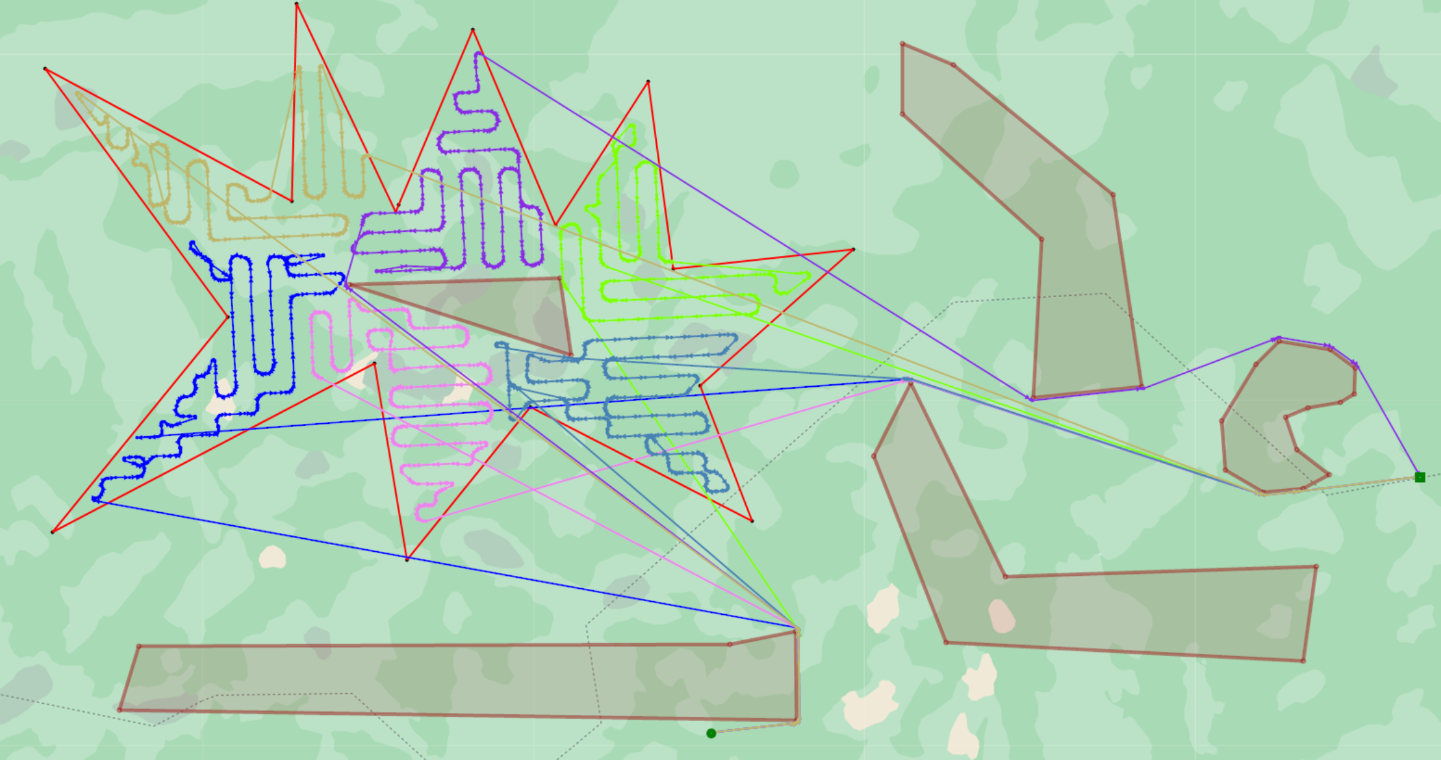
The software application PathPlanner developed by Fraunhofer IOSB is capable of creating optimized trajectories for individual mobile systems as well as for heterogeneous groups of mobile systems operating together in the context of resource-efficient reconnaissance mission execution: safe travel or flight from the starting position to the target position, trajectories for full reconnaissance coverage of complex areas (including approach and departure or arrival and departure), etc.
The planning process considers a magnitude of intrinsic and extrinsic parameters as for example obstacles and prohibited areas, including the necessary safety distances or the characteristics of the equipped sensors and of the mobile carriers, such as their maneuverability or their behavior at the boundaries of the reconnaissance or prohibited areas (depending on the situation, crossing the boundaries can be permitted or prohibited). In addition, it is also possible to specify the expected detection range and overlap of the sensors as well as other relevant parameters of the mobile systems, such as speed and power reserves.
Solution
The PathPlanner software application is integrated into the AMFIS integration platform developed by Fraunhofer IOSB. It is designed as a service and can be easily used not only for path planning for mobile systems controlled by AMFIS, but also in other application contexts.
The PathPlanner application has a detachable user interface and can additionally (when operating as a service) process orders for path planning via different interfaces (including ROS, MQTT). The software application can be adapted to specific customer requirements at short notice, e.g. additional interfaces and data formats can be added, planning features and resource specific characteristics can be added or exchanged. As examples PathPlanner can be easily integrated into various traffic control systems (such as for drone logistics) or reconnaissance and surveillance stations. PathPlanner is based on highly efficient path planning algorithms developed by Fraunhofer and can create fast planning results whilst the demands to system resources are low.
Workflow of the resource-optimized exploration of an area using PathPlanner
- Selection of the reconnaissance area as well as the start and final target positions of the mobile systems on a map.
- Specification of relevant parameters (e.g. no-fly zones, safety distances, flight altitude when using UAVs)
- Automatic planning of all routes using PathPlanner
- Automatic reconnaissance of the area by means of the mobile systems
- Georeferencing and fusion of the collected data
- Display of the data on the map and/or transfer to other systems (e.g. using AMFIS)