 |
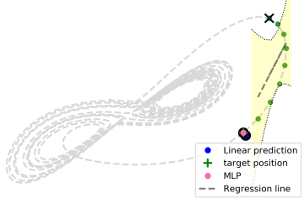
Path Prediction and Risk Assessment The prediction of possible paths, which e.g. pedestrians or vehicles will follow in a given situation, is a central building block for an automated risk assessment. In contrast to backward-looking inference methods, prediction has the advantage that it can be applied without time delay. Objective. Based on deep recurrent networks, a statistical model of spatial behavior is built up. The behavioral model integrates different information sources, like visually detectable obstacles, the behavior of other agents, as well as movement profiles along trajectories. |
 |
Automatic generation of complex filter designs State estimators, such as linear Kalman-filters or particle filters, are used for modeling dynamic systems, which have major applications in tracking tasks. In order to design efficient filter configurations, a variety of model assumptions have to be made, including object dynamics and the structure of system states. However, a manual configuration of complex filter designs is only possible up to a limited extent. The objective is to develop a machine learning based approach that can automatically generate complex filter designs. In this context, applications are envisioned which require complex filter systems, like the observation of objects without depth information ("monocular tracking"). |
 |
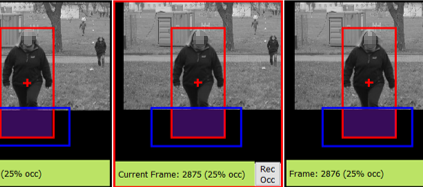
Integrated track management Tracking methods are usually used in conjunction with an object detector in order to ensure the identity of individual objects across multiple images. In addition to direct applications, like the generation of motion profiles, tracking approaches further help to improve the overall system performance. Although strongly depended, detection and tracking are often considered as isolated building blocks. The objective is the development of a deep learning architecture that integrates object detection and track management. This eliminates ad hoc processing steps, and further leads to a robust data association mechanism. |
 |
Semi-automatic data acquisition and processing The availability of large amounts of data combined with high-quality ground truth annotations is the foundation of most current machine learning techniques. Irrespective of the rapid development of learning algorithms, the lack of large data sets is still a significant hurdle for the applicability of deep learning methods. The objective is the development of an interactive modeling tool, which provides in addition to manual ground truth generation automated components for data preparation. These also includes privacy protection functions realized by anonymization of video data, like the removal of license plates. |
 |
Automatic monitoring of indoor activities Automated logging of indoor activities using video technology bears several key challenges including legal and social issues, scalability issues, and compatibility issues with other cyber-physical security systems. The objective of the project is the development of video analysis components that support automated generation of log files from video data. The log files can further be used to summarize or index video streams. They further build a data link to other cyber-physical systems at a semantically abstract level. |
 |
Multi-spectral video analysis In addition to images captured in the visible spectrum, IR images still provide sufficient information even in dim ambient lighting. Multi-spectral approaches are mainly used in order to deal with highly variable light and weather conditions. The application of machine learning approaches for IR images are mainly limited by the availability of training data. The objective is the development of suitable learning methods, which can transfer information from the visible spectrum into the IR spectrum in order to make approaches such as object detection and action classification applicable to multi-spectral sensor systems. |
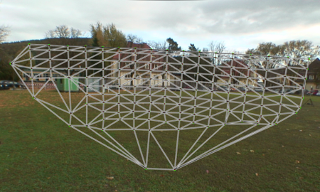 |
Auto-calibration of "master-slave" systems Observing large areas from a single view point poses the problem of finding a tradeoff between the field of view of a camera system and the minimum resolution required for many video analysis methods. Multi-focal systems offer a potential solution to this problem. Multi-focal systems can be based on a Master-Slave design, which consists of multiple cameras that need to be referenced between each other. The objective is to provide a simple auto-calibration method that allows to easily setup master-slave components based on affordable consumer cameras and that has minimum quality requirements on the mounting. |
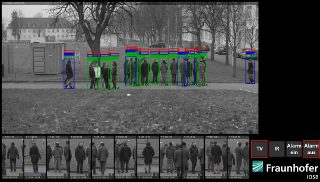 |
"Online" visualization of pedestrian tracks from single view points Observing and assessing situations over an extended period of time poses a major challenge for human observers, especially in complex, dynamic scenes where many events occur in parallel. The objective is to develop methods that generate a static visualization of dynamic scenes and thus relieve human observers. Individual tracks are automatically selected from pedestrian tracks ("Best Shot Analysis") and a static summary of individual motion sequences is generated. |