Challenge
Mobile laser scanning enables the acquisition of large-scale urban environments in only a few hours. The resulting 3D data represent the environment with high resolution and accuracy, which is suitable for tasks such as city planning and urban area monitoring. An important element of such tasks is the automatic change detection, which includes the automatic analysis of multiple measurements of an urban area collected at different points in time. The gathered information can help to detect damaged street furniture or to update 3D city models. In addition to these tasks, research is focused on risk assessment regarding special transports and heavy loads as well as the automatic planning of measuring campaigns.
Solution concepts
The successful acquisition and processing of laser scanning data requires a calibration of the involved sensor setup. In addition to the intrinsic calibration of the sensors, this also includes the determination of the transformation between sensors and the vehicle coordinate system (extrinsic calibration). In order to avoid a complex calibration setup, we work on methods to derive these transformations directly from measured data. The registration of point clouds, which are calculated based on the individual range measurements of the calibrated sensors, takes place via simultaneous localization and mapping (SLAM). This includes building a pose graph based on navigational data and sensor measurements, which is then modified by a non-linear optimization method in order to create a "3D image" of the environment that is as accurate as possible. Data originating from several measuring campaigns are registered to each other using a similar method.
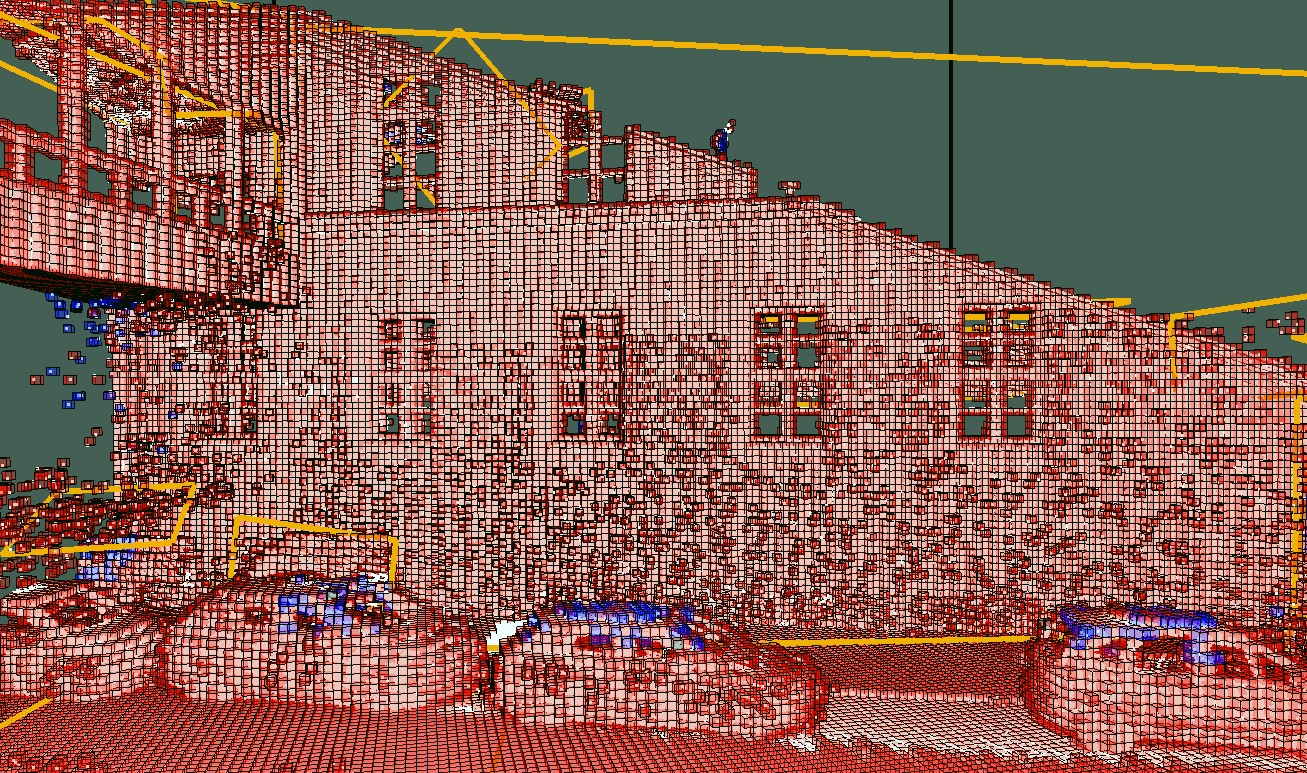
Fig. 1: Laser measurements of a street scene, iteratively approximated by an occupancy grid as it is also used for automatic change detection.
Measured data coregistered in such a way are suitable for automatic change detection. As a first step, object-based analysis tasks such as the detection and removal of moving objects are required to reduce the rate of incorrectly detected changes. The actual change detection utilizes a hierarchical occupancy grid, which is adapted to the measurement data in an iterative way that optimizes the ratio between spatial resolution and required memory. The particular strength of this approach is its representation of free and unseen parts of the environment in addition to the representation of surfaces. By comparing the data structures of several epochs, occupancy conflicts are determined, from which changes within the environment are derived.
Available data
As part of a measuring campaign in April 2016, mobile laser measurements of the inner city campus of the Technical University of Munich and the surrounding streets were collected and made available to the general public: TUM-MLS-2016
Publications
- Gehrung, J., Hebel, M., Arens, M., Stilla, U., 2020. Change detection and deformation analysis based on mobile laser scanning data of urban areas. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume V-2-2020, pp. 703-710. [doi: 10.5194/isprs-annals-V-2-2020-703-2020]
- Gehrung, J., Hebel, M., Arens, M., Stilla, U., 2019. A fast voxel-based indicator for change detection using low resolution octrees. ISPRS Geospatial Week 2019: ISPRS Workshop Laser Scanning 2019. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume IV-2/W5, pp. 357-364. [doi: 10.5194/isprs-annals-IV-2-W5-357-2019]
- Gehrung, J., Hebel, M., Arens, M., Stilla, U., 2018. A voxel-based metadata structure for change detection in point clouds of large-scale urban areas. ISPRS TC II Mid-term Symposium "Towards Photogrammetry 2020". ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume IV-2, pp. 97-104. [doi: 10.5194/isprs-annals-IV-2-97-2018]