The research work of the VID department in the field of driver assistance systems and autonomous driving covers the following areas:
- Situation prediction and maneuver planning
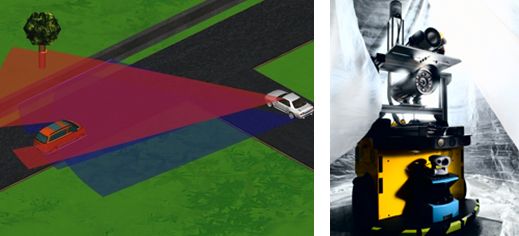
- Video-supported and multi-sensory environment perception (sensor fusion)
- Situation analysis and scene description
- Object recognition and tracking
- 3D reconstruction and modelling
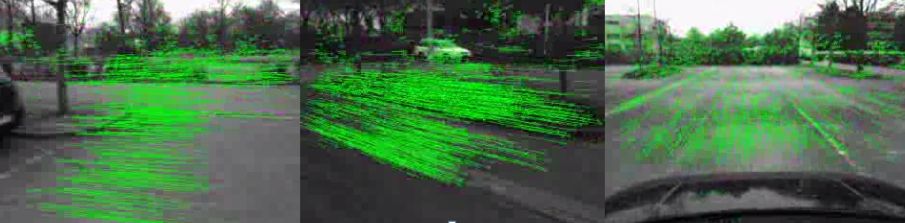
- Visual Odometry
- Multisensor calibration
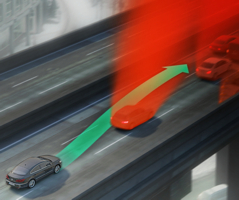
The artificial intelligence "SPARC" for fully automatic driving plans maneuvers that optimize safety, comfort, traffic rules and energy efficiency at the same time. The red clouds represent predicted locations of other objects; the green arrow describes the optimal driving maneuver to avoid a rear-end collision.
.")


")
