Situation
Project DAFNE created software for sensor data fusion improving situations awareness. It was a multinational EDA project with contributions from Italy, Netherlands, Poland, Czech Republic, and Germany running from 2009 to 2011. Particular focus was the use of context information and assessment of earlier data into the weighted fusion. IOSB has provided comparison between results and ground-truth and assessment of the gain.
Task
The project was to assess the gain through fusion of homogenous and heterogeneous sensor-data in comparison to the performance of single sensors alone.
Project
Difficulties in situational awareness result as well from restrictions in the field of view of sensors (e.g. due to buildings) as in the large numbers of moving objects such as persons or vehicles, of which only a small number is threatening. The question was when to fuse information from different sensors, when to reject information as unreliable, and how to use context and earlier observations.
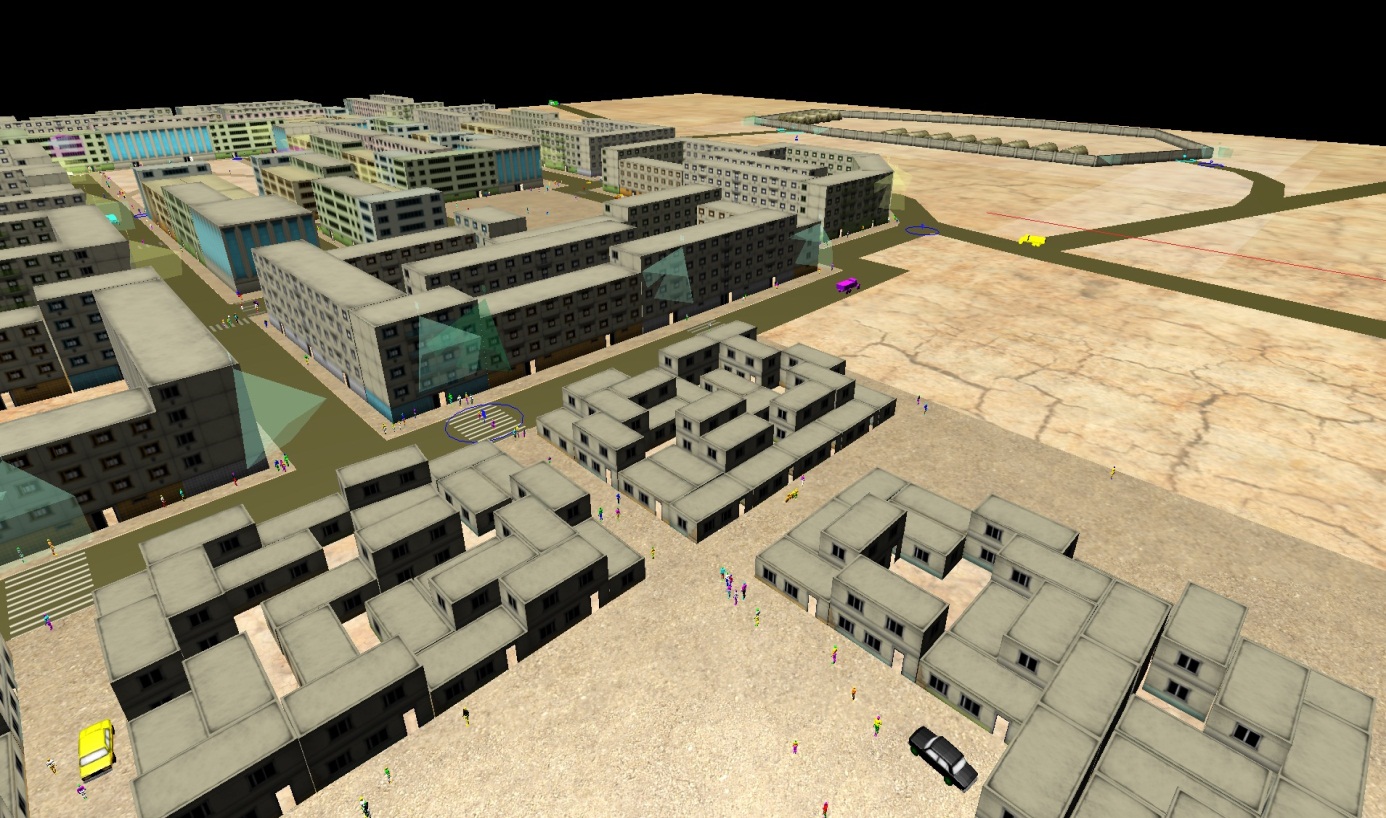
Example scenery for the DAFNE-system
To this end a dynamic scene-simulator was constructed. It provides single sensor observations to be fed into the DAFNE-system. The simulated data also provide ground-truth. Thus the gain through fusion could be assessed.
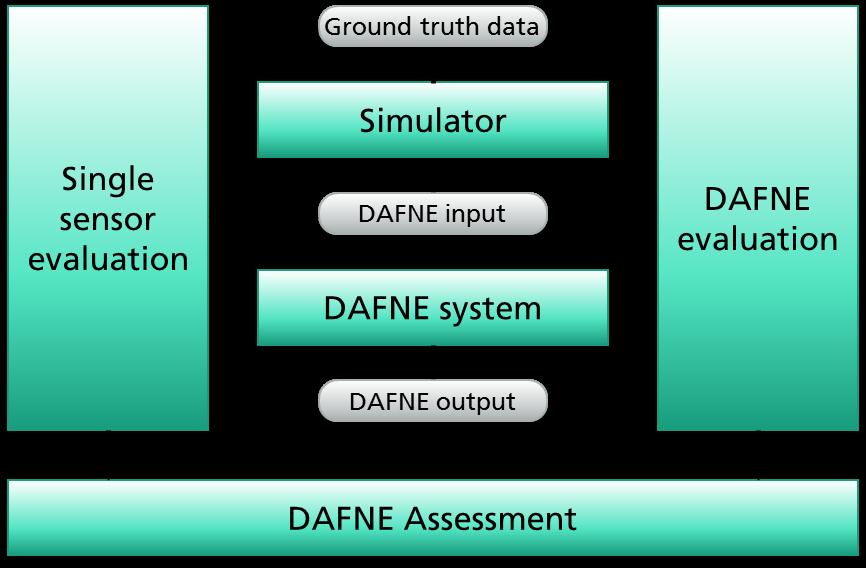
Assessment scheme for DAFNE
An already existing assessment scheme was augmented and criteria for the assessment were acquired. These criteria cope for attributes that single sensors can provide – such as position and speed of objects – and also for inferred information – such as “the object sets a threat, because it parks in front of an embassy building without permission”. Improvement of detection- and false-alarm-rates through the use of fusion could be demonstrated as well as significant improvement of the tracking reliability.
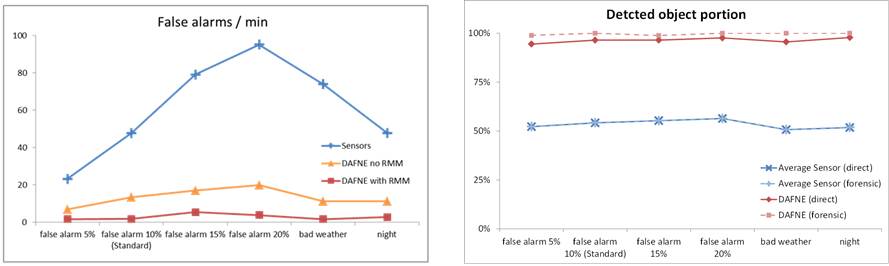
Left: Decrease in false alarm rates; Right: Increase in detection probabilities