

Goal and relevance
Critical maritime infrastructures are often at risk and can only be protected against sabotage, attacks or destruction at great expense. The HUGIN project was initiated to develop solutions to improve protection. HUGIN set itself the goal of researching and improving the collaboration and cooperation of intelligent, autonomous watercraft so that unmanned vehicles can protect such infrastructures more efficiently and with fewer resources in the future. Algorithms and technologies from a wide range of areas, such as artificial intelligence, data analysis and control technology, were integrated in such a way that the overall demonstrator, consisting of several vehicles, can plan missions independently in various scenarios and execute them in a resource-optimized manner.
In addition to the development of a modular and interchangeable control system, the flexible use of different carrier platforms and sensor technology was also taken into account by using different types of watercraft as well as a heterogeneous range of sensors.
Unique selling point
- 24/7 protection of critical maritime infrastructures
- Cost reduction compared to manned vehicles (less personnel)
- Time savings through distributed use of several platforms (parallel processing of several tasks)
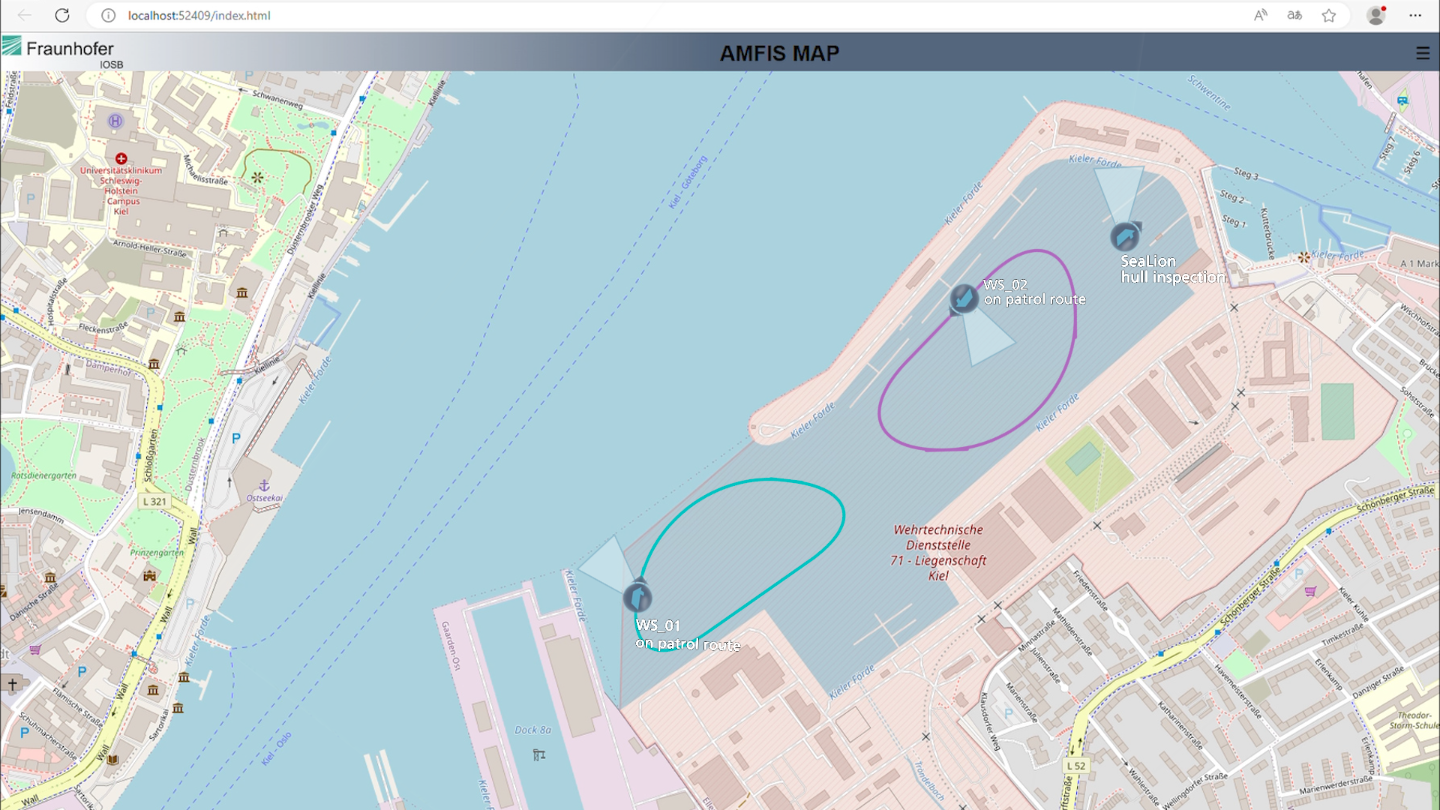
Protection of critical maritime infrastructures
- LNG terminals
- Ports
- Other terminals (e.g. grain)
Hull inspection
- Smuggled goods
- Shellfish infestation
Protection and inspection of offshore systems
- Wind Parks
- Pipelines
Project goals
The group of watercraft integrated in HUGIN should be able to coordinate internally, understand complex tasks, translate them into concrete plans and work on them cooperatively. In doing so, they can react to the environment both situationally and system-related and respond dynamically to changing requirements with plan adjustments.
The intended use cases are the comprehensive, indefinite control and monitoring of infrastructure, the protection of critical properties or transportation routes, the search for mines and munitions remnants on the seabed or the monitoring of environmental conditions.
Outlook
The HUGIN project investigated various aspects, including communication and coordination between unmanned watercraft, their autonomous navigation and path planning, sensor and data fusion, and the development of intelligent algorithms and decision-making systems.
The Fraunhofer HUGIN project plays an important role in the development of technologies for the use of intelligent watercraft in maritime applications and research into cooperation between autonomous vehicles on the water.

