Kurzbeschreibung des Projektes
Ein Bagger arbeitet ohne einen Bediener? Ja, den gibt es. Entwickelt hat ihn das Fraunhofer-Institut für Optronik, Systemtechnik und Bildauswertung IOSB aus Karlsruhe. Der autonome Bagger »IOSB.BoB« (»Bagger ohne Bediener«) kann beispielsweise Gefahrstoffe bergen oder kontaminierte Bodenschichten abtragen und stellt ein flexibles Demonstrations- und Entwicklungssystem zum Test skalierbarer Autonomiefunktionen dar.
Projektziele
Menschen müssen sich nicht mehr in Gefahr begeben
Roboter werden in Zukunft selbstständiger und vernetzter agieren. Sie arbeiten Hand in Hand mit Menschen zusammen oder sie erkunden eigenständig gefährliche Umgebungen. Sie entwickeln sich zu autonomen Systemen. Diese können komplexe Aufgaben lösen, eigene Entscheidungen treffen und lernen, auf unvorhergesehene Ereignisse zu reagieren. Nach Naturkatastrophen – z. B. einem Erdbeben – oder nach Industrieunfällen – z. B. einem Brand in einem Chemiewerk – sind die Einsatzkräfte auf einen aktuellen und präzisen Lageüberblick angewiesen.
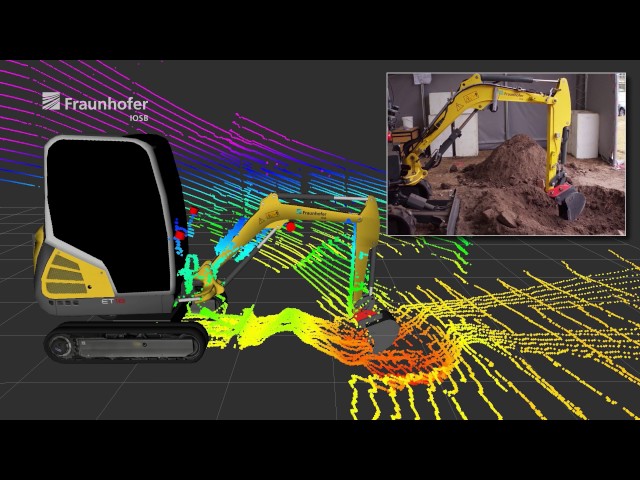
Projektergebnis
Das Fraunhofer IOSB hat daher ein System entwickelt, das aus autonomen Fahrzeugen und Sensor-Sonden besteht. Es ermöglicht, unzugängliche Gebiete zu erkunden, ohne dass sich Menschen in Gefahr begeben müssen. Dank einer Toolbox aus Algorithmen für die Lokalisierung, Kartierung, Hinderniserkennung und Bewegungsplanung können sich Roboter selbstständig in unbekanntem, unstrukturiertem Gelände fortbewegen.